
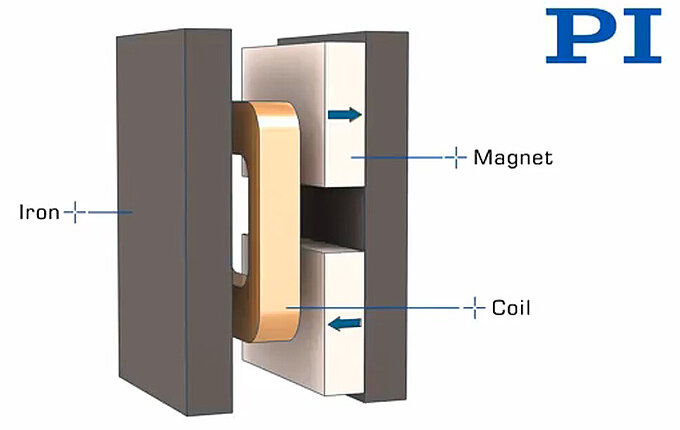
Motion control systems, which typically control the position of stage or actuator, are sometimes tasked to provide both position and force control. These systems work in a dual mode, where the motion controller either controls the position or the force applied. In force-control mode, the motion stage must apply a controlled force while the position can vary. In position control mode, the stage position is controlled via closed-loop servo, using a position encoder as feedback. When coupled with a direct-drive linear motor, the lack of friction in an air bearing means that the driving system (motor, controller, drive) can transduce electrical current directly into applied force. The absence of friction in the bearing means that no parasitic forces are present, and force can be directly controlled via the closed-loop servo, without the need for an external force sensor.

The amount of force that can be applied is a function of the available power in the motor and drive system. The precision and resolution to which force can be controlled is a function of the motion control system fidelity and bandwidth. Force can be applied in either vertical or horizontal directions. In the case of vertical motion, a counterbalance system is required. The counterbalance system must be designed to be friction-free, so no parasitic friction is introduced into the system.
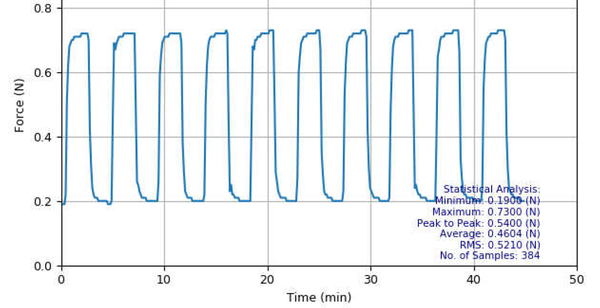
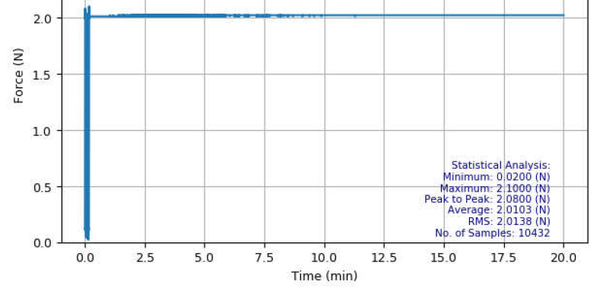
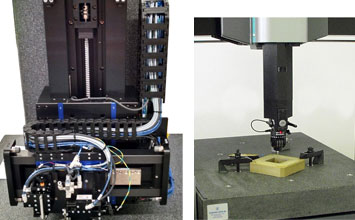
In a typical force control application, the linear actuator or stage must be moved into a position very close to the point at which the stage and the target substrate come into contact. The motion controller dynamically switches to force control mode (without losing servo lock) and moves the stage until a target force is reached. The control system can then maintain a constant force or vary the force to follow a programmed profile. In this mode, the stage’s position is allowed to move freely while the applied force is controlled.
Common applications for force control include:
- polishing of flat or non-flat surfaces
- micro-machining
- brake friction testing
- assembly operations where a force must be applied during a weld or bond operation
- touch-screen sensitivity testing
- durability and life cycle testing of touch interfaces and push-button components
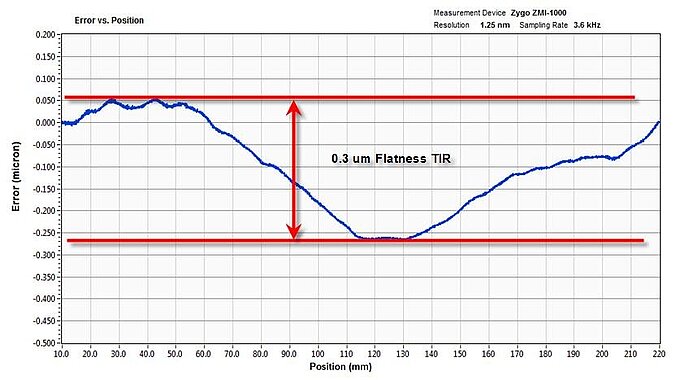
The precision and repeatability levels to which the applied force can be controlled will vary system by system. PI has built several custom air bearing actuator systems where forces as small as 0.5N can be controlled with an accuracy and repeatability of better than +/-0.02N.





Blog Categories
- Aero-Space
- Air Bearing Stages, Components, Systems
- Astronomy
- Automation, Nano-Automation
- Beamline Instrumentation
- Bio-Medical
- Hexapods
- Imaging & Microscopy
- Laser Machining, Processing
- Linear Actuators
- Linear Motor, Positioning System
- Metrology
- Microscopy
- Motorized Precision Positioners
- Multi-Axis Motion
- Nanopositioning
- Photonics
- Piezo Actuators, Motors
- Piezo Mechanics
- Piezo Transducers / Sensors
- Precision Machining
- Semicon
- Software Tools
- UHV Positioning Stage
- Voice Coil Linear Actuator
- X-Ray Spectroscopy