10 Key Questions & Answers for Precision Motion & Positioning System Users
What You Need to Know before Selecting a Motion System
- How to Define Precision When Discussing Motion Control and Nanopositioning
- How is Process Variability Influenced by Motion Control Performance?
- What Industries Rely Most on Precision Positioning and Motion Control?
- What are Some Real-World Applications Where Progress in Precision Motion Control has Made a Significant Impact?
- What are the Typical Obstacles to Achieving High Precision in Motion Control Systems?
- What Environmental Conditions Impact Precision in Motion Control Systems?
- How Does System Complexity Impact Motion Control Performance?
- What Strategies can Help Overcome Precision Challenges in Motion System Design?
- What Recent Innovations in Motion Control Have Led to Improved Precision?
- What Future Trends & Innovations Can be Expected in the Field of Precision Motion Control?
1. How to Define Precision When Discussing Motion Control and Nanopositioning
“Precision” is a classical mechanical-engineering term with a formal definition: the dispersion about the mean for a significant number of positioning trials as measured by a perfect ruler.
For motion control at the sub-micron and nanometer level, things are not that simple. It is obviously impacted by the classical specification for the hardware, but there is much more that goes into it. And which parts matter most, is defined by the user’s application, making it vital to engage with suppliers capable of assessing and seeing the application holistically.
Depending on the user’s requirements, precision can also include how consistently, velocity and a multi-dimensional path can be controlled with minimal deviation. In addition to repeatability (the ability to consistently return to the same position), this includes factors such as minimum incremental motion (often confused with sensor resolution), and accuracy (how closely the actual position matches the intended one). In some applications, following a path based on predefined coordinates and velocity may not be of the highest priority, instead tracking a target precisely based on some external feedback, can be more important. More on the » definition of accuracy and repeatability.
For example, an application may require coupling an optical fiber to a laser diode with 0.02 dB reproducibility, verified through statistically valid measurements. While classical positioning repeatability is important, it is not sufficient to achieve this level of precision. More critical is the performance of the motion controller’s alignment algorithms. The speed at which these algorithms complete the task is also a key consideration. Addressing such challenges requires a supplier with deep expertise — not only in motion control but also in the broader application context.
So, we would “define precision in the framework of motion control” as just part of a deep-dive conversation about the application and its goals. More information can be found in our article » “Defining Micropositioning and Nanopositioning Terminology”.
2. How is Process Variability Influenced by Motion Control Performance?

Process variability is directly impacted by positioning precision. In this context, several factors must be considered: the mechanical components (such as bearings, drive screws, material combinations, and base plate precision), the type and presence of feedback devices (or lack of), the quality and noise level of the electronics, and the performance of the motion controller responsible for generating and correcting the motion path. Additional factors that ultimately affect overall precision and process variability include sensor data accuracy and other information the system relies on to create or adapt motion.
3. What Industries Rely Most on Precision Positioning and Motion Control?
Precision motion control is vital especially in processes where even minor deviations in accurate, consistent, and dependable motion and positioning performance can cause failure, or poor yield.
Examples
Laser machining / processing:The precision of a positioning stage, fast steering mirror or galvo scanner, goes directly to the quality of the process. A sloppy positioner (that is, one with poor repeatability, path, and velocity control) will yield parts of poor conformity and yield, classical issues found in laser drilling result in elliptical holes with undesirable bumps rather than a clean round circle or side walls with undesirable tapers where the controller or mechanics are unable to compensate for the desired side wall profile. These errors are amplified when throughput is increased.
Microscopy: The ability to scan or section a specimen and then return to a specified point (for further analysis, for example) is determined by the positioner’s repeatability performance. Modern microscope stages can provide nanometer scale repeatability.
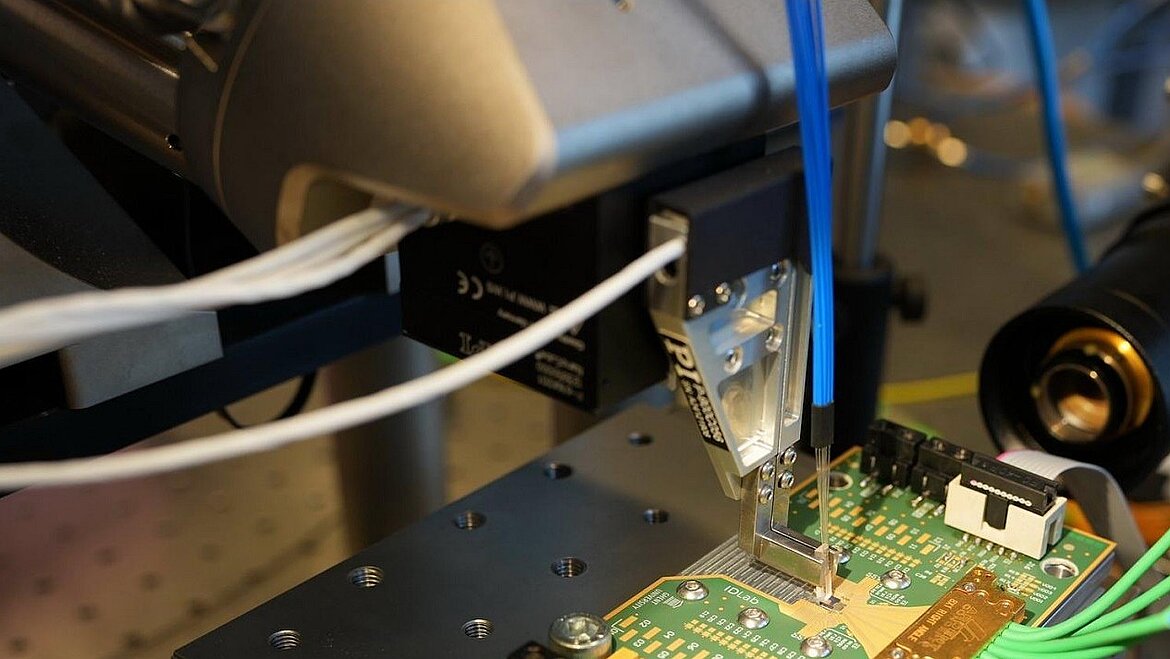
Photonics: The demand for photonic integrated circuits (PICs) is predicted to grow by 3 orders of magnitude in the near future. The ability to localize and identify a position of best alignment depends on the positioner’s ability to scan a photonic coupling and return reliably to the point of observed or calculated maximum photonic throughput. Automatic alignment, test, and assembly equipment must be as precise as a few tens of nanometers to achieve performance targets.
Semiconductor Manufacturing: High-precision motion control is essential in lithography, wafer test and assembly, where even single digit nanometer inaccuracies can affect product quality.
Aerospace: Precision is critical for beam steering systems used for free space optical communication between satellites as well as for alignment of cameras and optical components.
Optics: Manufacturing of high precision optics requires active optical alignment of multi-lens systems, from cell phone cameras to the highly complex lenses and mirrors used in modern lithography systems often requires nanometer to sub-nanometer precision.
4. What are Some Real-World Applications Where Progress in Precision Motion Control has Made a Significant Impact?
Semiconductor Technology: Modern society depends heavily on semiconductors — particularly integrated circuits such as CPUs, microcontrollers, and memory modules. The familiar downward physical scaling of Moore’s Law drives both an upward trend in capability and processing power and a downward trend in cost due to the ability to generate more chips per wafer. These are only possible with ever-improving capabilities to control motion with sub- micron or even nanoscale repeatabilities. Structures in the first microprocessors from the 1960’s were on the order of 10 microns and have been reduced to single digit nanometers for the latest generation of chips. Without the continuous advancements in motion control, precision mechanics, and optics, no such progress would be possible and AI and autonomous vehicles would still be science fiction.
Precision is even needed to measure precision. CMMs and other metrology and inspection systems need motion control systems that can provide resolution and accuracy typically 10 times above the level of the device being measured. Precision metrology ensures that tolerances are met, reducing the likelihood of defects. Applications involving metrology of high precision optics rely on precision to measure curvature and surface smoothness, as minor imperfections will distort light and impact their optical performance.
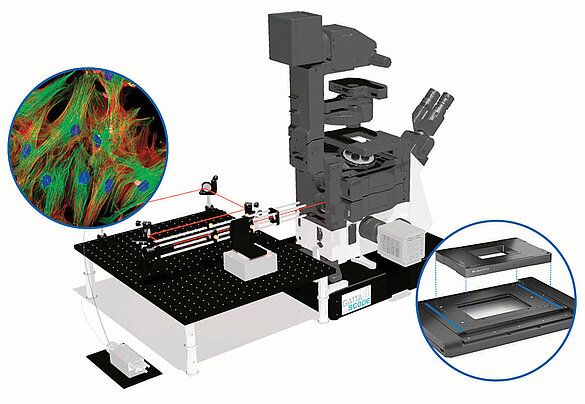
Super-Resolution Scanning Microscopy: Progress in nanopositioning scanning technology and precision motion control has enabled optical resolution that can image biological processes in the low nanometer range. This is orders of magnitude better than what was able to achieve with classical static microscopes, that are limited by the laws of diffraction.
DNA Sequencing: Without recent advancements in the precision and speed of motion stages and controllers, the democratization of genome analysis would not have been possible. Typically, motion control in three axes is required: samples are scanned in the XY plane, while a high-speed focusing stage in the Z-axis ensures optimal optical resolution and maximum throughput. » More on nanopositioning and motion control for DNA sequencing
Eye surgery: Motion systems and controllers that can synchronize laser output and a motion path precisely are the prerequisite for successful laser eye surgery.
5. What are the Typical Obstacles to Achieving High Precision in Motion Control Systems?
The biggest challenge, of course, is that success in these applications involves more than just precision. Numerous factors come into play, including the control of ambient and motion-generated vibrations. Ideally, a motion supplier would act as a consulting partner, leveraging extensive experience in similar applications.
In general, challenges multiply as precision requirements increase. Mechanical issues, such as friction, backlash, vibration, and rumbling noise from bearings, are common. These are best addressed with frictionless air bearings, magnetic bearings, flexures, or frictionless direct-drive motors, such as linear or torque motors, or piezoelectric actuators.
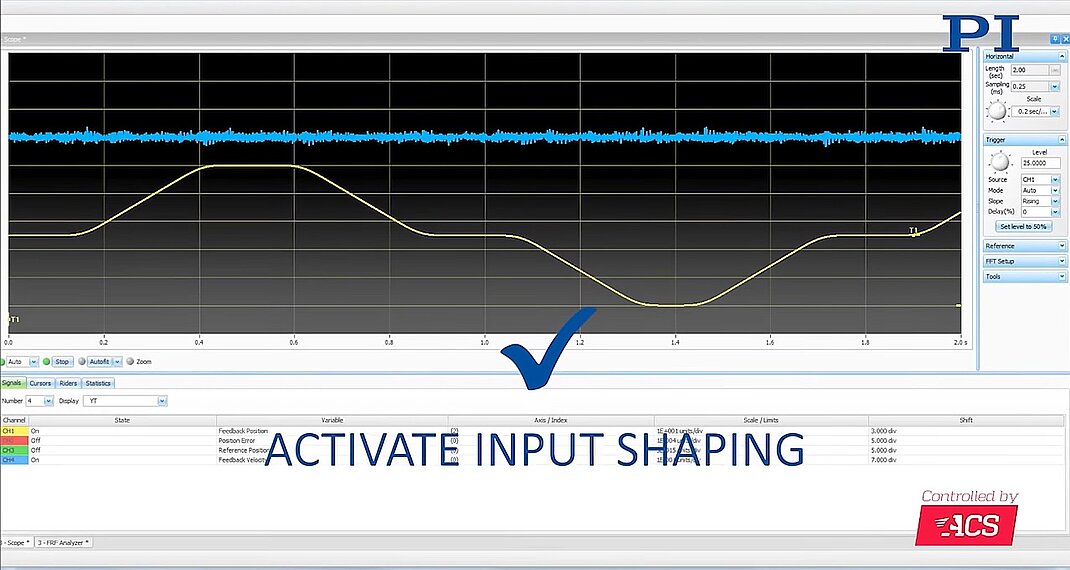
Vibrations: Vibrations present another challenge, whether originating externally or internally from system components — such as motors and bearings — or induced by rapid acceleration or poor velocity control. These vibrations can impact system performance and are mitigated through stiff designs, intelligent control algorithms such as Input Shaping, Servo Boost, or Nano PWM drives, or by incorporating on-board vibration cancellation units. External vibrations from the ground can be isolated using passive air-based systems or actively countered with piezo-based active vibration floor cancellation systems, such as the TMC Stacis.
Sensor Bandwidth, Resolution and Accuracy: The resolution and linearity of encoders are main error sources. Here, encoders with a high pitch, plus linearization in the controller firmware – accomplished during calibration with external highly accurate laser interferometers – can make significant impacts on the precision.
Control SystemBandwidth: Here, limitations can lead to sloppy behavior, following errors and slow settling. Choosing a system with high servo update rates and an EtherCat based architecture is a good base for success.
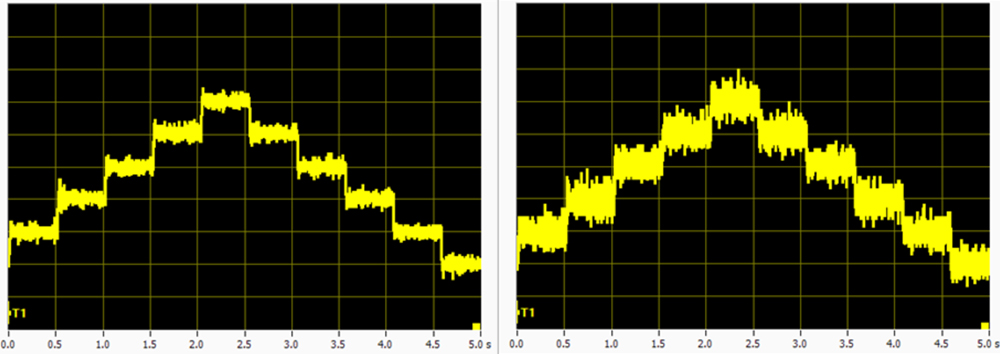
Another challenge is that motion control vendors often generate specifications with poor relationship to actual application usage. For example, you will often see “repeatability” demonstrated with beehive charts composed of N motions in one direction followed by N motions in the opposite direction. In such a test, the repeatability is alleged to be demonstrated by the correspondence of each forward step with its reverse-step partner. The limitation, however, is that there is only one reversal in the entire test. In that sense, it does not yield N data points. A more stringent standard for these measurements is ISO 230-1.
Another even more statistically valid approach would be to start at each of M random offset positions, with each followed by a random motion, followed by a return. The difference in measured position between each random offset and the return to that position, compiled over a large number M of trials, builds a typically Gaussian statistical picture of the positioner’s repeatability. Note that each data point involves a reversal! That is how most applications typically work. But this testing methodology is time-consuming and very illuminating of any flaws in a motion device.
Many real-world applications for precision motion control require motion in multiple directions and therefore its combined performance can’t be simply derived from the specifications of a data sheet for a single component actuator or stage. Error mapping in more than one axis is complicated but provides significant precision gains for multi-axis motion applications.
Another challenge is that precision data is often presented as static where the name suggests motion is a dynamic property. How a system performs with a contour velocity of 30mm/sec can be quite different to when it is moving at 500mm/sec.
6. What Environmental Conditions Impact Precision in Motion Control Systems?
Vibration, as mentioned above, must be controlled to a level commensurate with the application’s goals. For example, if a task requires scanning to discern 0.5 micron features — a requirement common in applications ranging from the life-sciences to photonics to semiconductors — then the vibrational amplitude of the supporting structure and all contributing elements must be smaller than that. Similarly, thermal variations that could cause micron-scale dimensional changes must be controlled. Environmental electrical noise is also an additional route for corrupting data and hence, precision.

Temperature variations can cause components to expand or contract, affecting tolerances and alignment, especially when different materials are used in one system, for example steel bearings on an aluminum stage body. This can lead to misalignment in guides, impacting positioning accuracy. Low temperatures especially when looking at space applications can increase friction in bearings and screw drives, and high temperature can affect viscosity of lubricants rendering them less effective.
Vacuum applications require special materials, lubricants, and venting of all blind holes to eliminate virtual leaks.
Dust, moisture, metal particlesetc., can severely impact the precision and reliability of motion and positioning systems. They introduce friction, contaminate bearings and encoders, and can cause electrical interference or mechanical wear. These contaminants degrade performance, reduce repeatability, and increase maintenance, especially in high-resolution or cleanroom-sensitive applications.
Motion systems must be designed to feature protective measures to minimize the effects of these contaminants.
7. How Does System Complexity Impact Motion Control Performance?
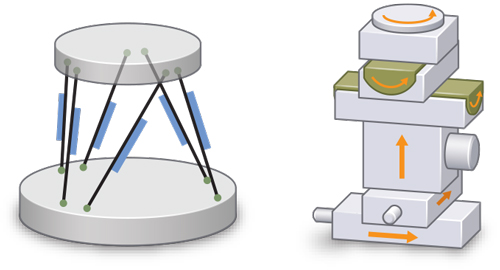
System complexity could be something as ordinary as managing multiple cables, and each cable is a potential path for vibration and unwanted forces to travel to the sensitive parts of an application. Complexity can mean more mechanisms bolted together, reducing structural rigidities, a source for vibration and other errors. Complexity may necessitate longer elements, imparting torque moments and lowering stiffness and resonant frequencies – increasing settling time. Clearly, simple, elegant and compact designs with good attention to kinematics will have an edge in precision and overall application performance. An example is the parallel-kinematic approach of a 6-axis hexapod compared to a stack of six individual stages.
In general, multi-axis motion systems are significantly more complex to manage in terms of precision because guiding errors of each degree of freedom accumulate and affect the precision of all involved axes. For example, if motion of an X-axis linear stage produces unwanted lateral runout of 1 micron, the Y-axis linear accuracy itself could be perfect, yet the Y-position would still be off by 1 micron as compared to the controlled and indicated position. This can be fixed by multi-axis error mapping with a sophisticated interferometer setup. » More on error mapping
8. What Strategies can Help Overcome Precision Challenges in Motion System Design?
Addressing precision limitations in motion systems involves advanced technologies and strategies that target the root causes of the errors. Consider a case where high precision is required across a wide temperature range: here, materials with a low coefficient of thermal expansion (CTE) — such as granite, Invar, ceramics, or Zerodur (a lithium-aluminosilicate glass-ceramic) — are commonly used. However, proper material matching is equally important. For instance, bolting an Invar stage onto an aluminum structure can be counterproductive, as the thermal expansion of aluminum may cause the Invar stage to bend. Direct measuring encoders and frictionless direct drive motors, positioned as close as possible to the center of a linear stage, reduce measurement errors caused by torque applied to the moving platform. A centrally mounted linear motor also minimizes geometric errors in the moving platform.
Precision in XY and XY-Rot-Z positioning systems can be enhanced with a planar design in which all axes reference the same base plate — a parallel-kinematic approach. This architecture is particularly effective in planar air-bearing motion systems magnetic levitation stages, and piezo flexure stages, where inherent stiffness, lack of friction, and high geometric stability contribute to improved accuracy.
For 6DOF positioning systems, parallel-kinematic hexapods offer significant advantages over traditional stacked designs. These include a more compact footprint, greater structural stiffness, a programmable pivot point, and the elimination of cumulative guiding errors from individual axes. Additionally, hexapods avoid friction and torque caused by cable drag, further enhancing precision and dynamic performance.
External metrology systems — such as laser interferometers — can significantly enhance accuracy by providing direct position feedback, independent of the drive mechanism, providing an even higher level of accuracy.
Advanced control algorithms and drives with minimal current ripple, such as the ACS NanoPWM drives improve stability and resolution.
Error mapping using external metrology is a technique where an error profile is created in the controller, that will be applied in real-time to correct for deviations of the ideal position. If the controller has a high bandwidth and sufficient processing power, the correction can even be used during high-speed motion, not just at the end of a move.
The most important strategy is to talk to an experienced motion system provider willing to share their knowledge and be a partner for an application or project. Beyond the benefits of having such a partner involved at the earliest stages of application development, a desirable motion supplier will have a deep toolkit of technologies to draw from, and a business model that can support the process from earliest explorations to rapid scaling and deployment.
9. What Recent Innovations in Motion Control Have Led to Improved Precision?
In the rapidly growing field of silicon photonics, aligning optical fibers to components, such as lasers, microlenses, waveguides, and fiber arrays, requires nanometer-level precision. For high-volume industrial production, both alignment speed and accuracy are critical. New AI-supported alignment algorithms and mechanisms have reduced alignment times by orders of magnitude.
Optical encoder technology has been improved continuously. The latest encoders provide picometer range resolution. Positioning accuracy in a motion system very strongly relies on the quality of the position sensor.
Other improvements include hybrid approaches that combine traditional servo-motor actuators with piezoelectric mechanisms. These systems use a common sub-nanometer resolution linear encoder for feedback and a specialized servo controller that splits the control signal — sending high-frequency components to the piezo drive for fine correction and low-frequency components to the servo drive for coarse motion.
This hybrid concept was used in more than two thousand nanopositioning actuators for the Extreme Large Telescope (ELT), the largest optical telescope in the world. Three actuators are employed per mirror segment, capable of achieving single digit nanometer path accuracy.
Motion control algorithms based on AI and machine learning provide additional benefits.
In traditional feedback and feedforward servo schemes, the ability to reject disturbances is limited by the system’s servo bandwidth. However, with the latest control technologies — such as learning-based motion control — disturbances beyond this conventional bandwidth limit can now be effectively compensated. This results in significantly reduced steady-state jitter and improved disturbance rejection, leading to superior overall motion performance.
Advances in control algorithms now enable improved step-and-settle behavior, reduced following errors, and more efficient use of motor dynamics. These innovations can virtually increase a motor’s force constant, allowing it to run cooler or deliver higher performance from a smaller form factor — enhancing both precision and system efficiency.
Recent developments in PWM servo drives — specifically NanoPWM technology — now achieve the low noise levels typically associated with linear amplifiers, while offering substantial savings in cost, size, and weight. This reduced noise enables position resolutions below 1 nanometer, making them ideal for ultra-precision applications.
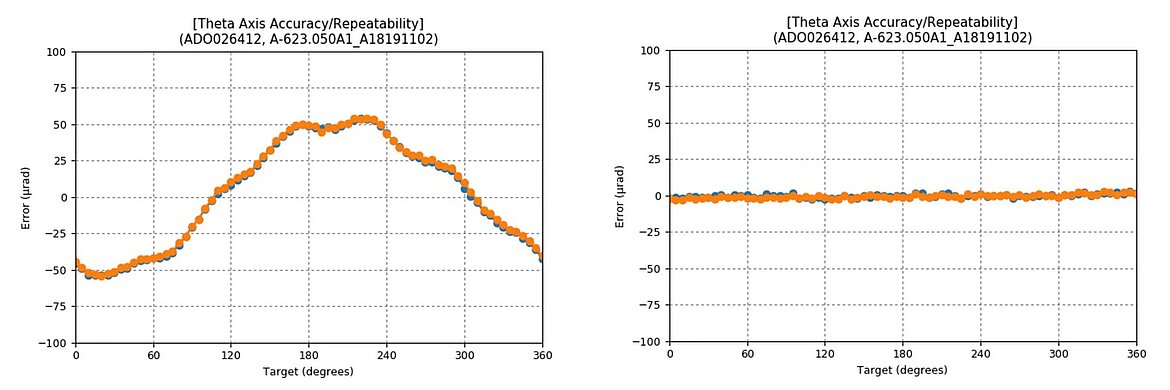
Multi-axis error compensation represents a key innovation in precision motion control. In this approach, a complex factory metrology system measures positioning errors across multiple degrees of freedom. These error profiles are stored in a compensation table within the controller, which automatically adjusts every motion command to correct for the known deviations in each axis. This process is entirely transparent to the user, enhancing system accuracy without requiring additional effort during operation.
10. What Future Trends & Innovations Can be Expected in the Field of Precision Motion Control?
The trend toward higher-precision sensors is expected to continue, while AI is poised to further enhance the performance of motion controllers. Integrating complementary technologies — such as piezo actuation with air bearings — will enable long-travel motion with sub-nanometer precision, meeting the demanding requirements of next-generation semiconductor test and manufacturing systems and pushing the limits of what’s possible in precision motion control.
Magnetic Levitation technology enables completely bearing-free motion with six degrees of freedom, eliminating mechanical contact and friction. This allows for ultra-smooth, precise positioning, ideal for applications requiring clean-room compatible, maintenance-free operation and high dynamic performance.

Active surface shaping technologies using piezo actuators enable precise control of surface flatness, enhancing accuracy in critical optical and semiconductor wafer applications. Additionally, smart actuator technologies can actively cancel internal vibrations within motion systems, supporting higher control bandwidths and increased throughput without compromising precision.





Blog Categories
- Aero-Space
- Air Bearing Stages, Components, Systems
- Astronomy
- Automation, Nano-Automation
- Beamline Instrumentation
- Bio-Medical
- Hexapods
- Imaging & Microscopy
- Laser Machining, Processing
- Linear Actuators
- Linear Motor, Positioning System
- Metrology
- Microscopy
- Motorized Precision Positioners
- Multi-Axis Motion
- Nanopositioning
- Photonics
- Piezo Actuators, Motors
- Piezo Mechanics
- Piezo Transducers / Sensors
- Precision Machining
- Semicon
- Software Tools
- UHV Positioning Stage
- Voice Coil Linear Actuator
- X-Ray Spectroscopy