C-887.5220 NEW!
6-axis controller for hexapods, TCP/IP, RS-232, benchtop device, incl. control of two additional axes, motion stop

C-887.5330
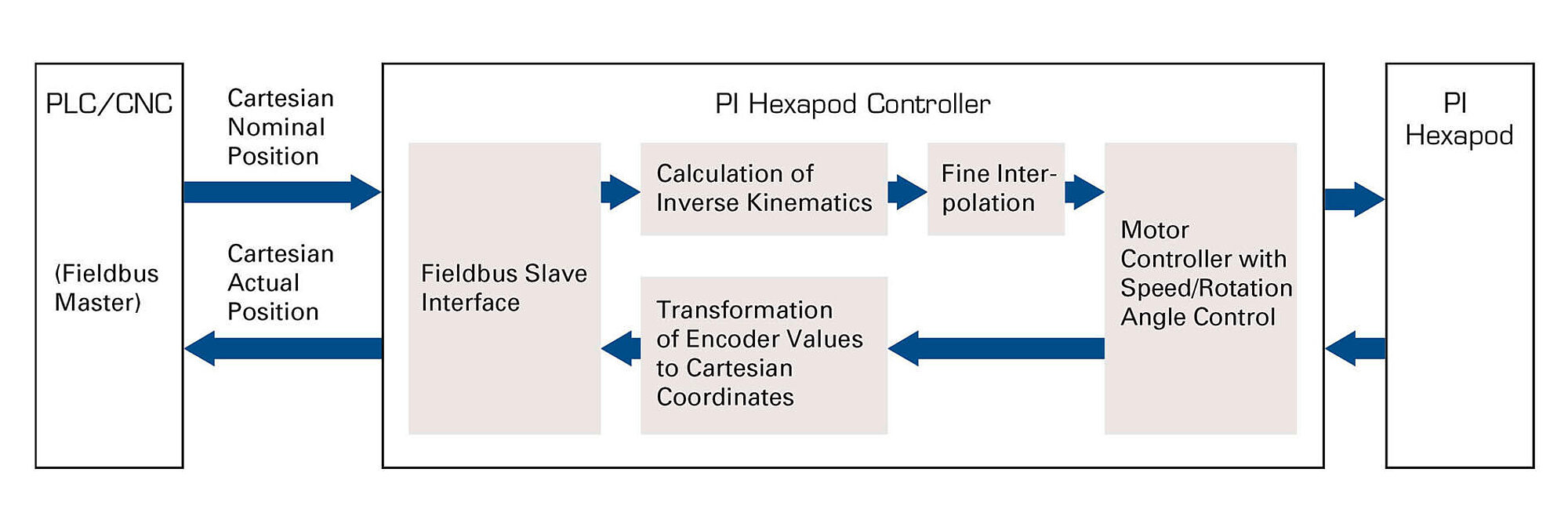
Integration of the hexapod motion controller into an automation system
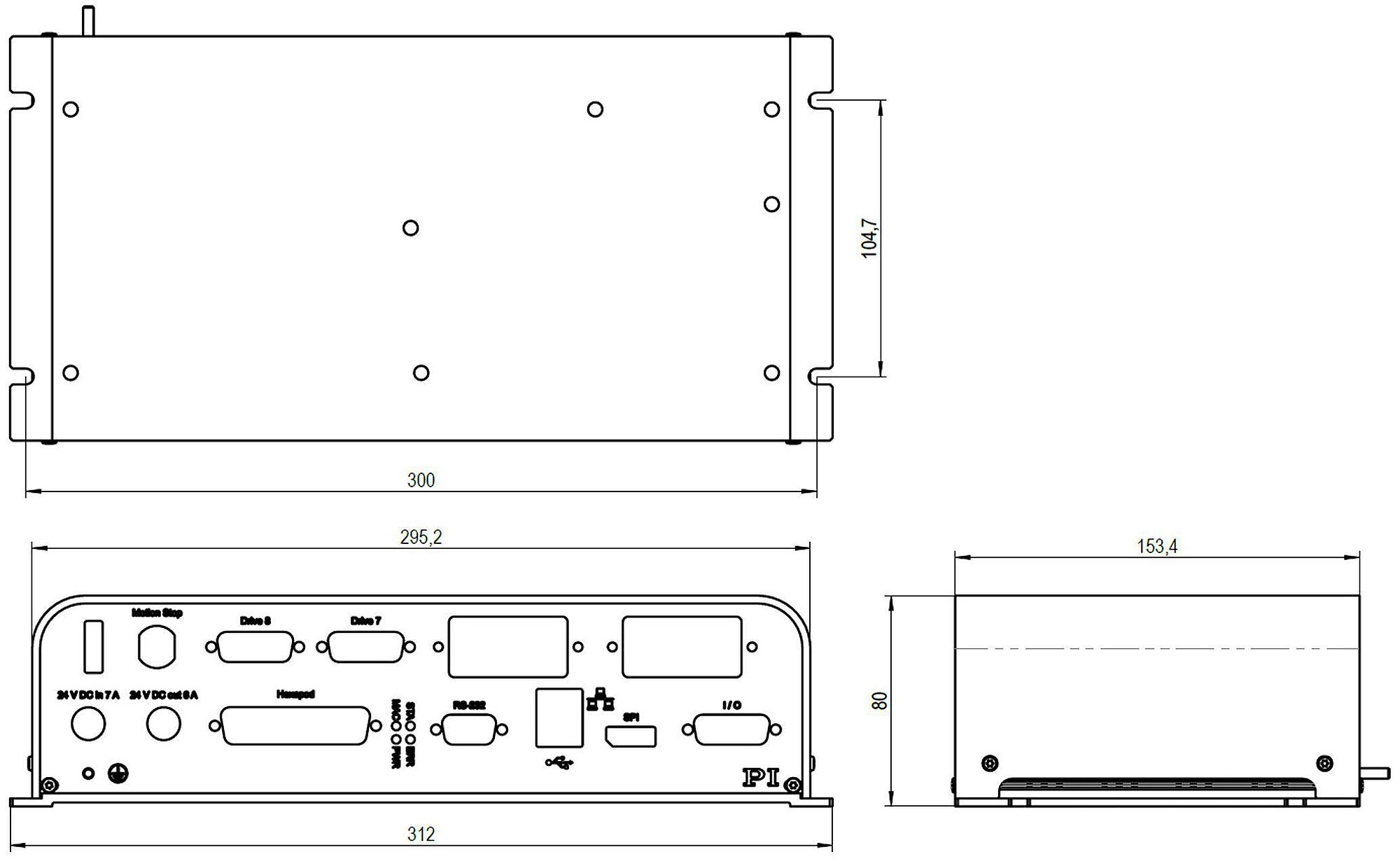
C-887.5x0, dimensions in mm. Note that a comma is used in the drawings instead of a decimal point.

C-887.5230




Controller for 6-axis parallel kinematics
High-performance controller for controlling hexapods (6-axis parallel kinematics). Supports a wide range of drive types as the controller only provides the control signals, whereas the motor drivers are located in the hexapod or in a separate driver box. The controller supports all currently available standard hexapods from PI and, in addition, customized parallel kinematics. In addition, the motor drivers for two further single axes can be controlled.
Functions
The position is entered in Cartesian coordinates from which the controller calculates the control of the kinematics. To simplify integration of the hexapod, the coordinate systems (Work, Tool) can be changed. The center of rotation can be freely defined in space. A data recorder can record operating data, e.g., motor control, velocity, position, or position error. The execution of macros and Python scripts on the controller enables standalone operation. An external switch, e.g., a motion stop button, can be used to enable/disable the 24 V output for the hexapod.
Interfaces
For use with the GCS 2.0 command set for PI positioning systems:
Depending on version:
Extensive software support
For controlling via GCS-based interfaces. For example, PIMikroMove user software enables Fast Alignment routines to be depicted graphically. Extensive set of drivers, e.g., for use with C, C++, C#, NI LabVIEW, MATLAB and Python. PIHexapodEmulator for virtual startup and operation without hardware.
Scope of delivery
The scope of delivery includes the controller, a software package, and a power adapter for the power supply. It is recommended to order the hexapod mechanics and a suitable cable set together with the controller so that the components can be adapted to each other. A PLC master controller is not included in the scope of delivery.
| Basics | C-887.5220 | C-887.5230 | C-887.5330 | |
|---|---|---|---|---|
| Axes | 6 | 6 | 6 | |
| Additional axes | 2 single axes | 2 single axes | 2 single axes | |
| Processor | Intel Atom Dual Core (1.8 GHz) | Intel Atom Dual Core (1.8 GHz) | Intel Atom Dual Core (1.8 GHz) | |
| Application-related functions | Controller macros GCS ǀ Controller macros PIPython ǀ Startup macro ǀ Data recorder | Controller macros GCS ǀ Controller macros PIPython ǀ Startup macro ǀ Data recorder ǀ Fast Alignment | Controller macros GCS ǀ Controller macros PIPython ǀ Startup macro ǀ Data recorder ǀ Fast Alignment | |
| Protective functions | Switch-off via an external switch ǀ Switch-off of the servo mode in case of an error | Switch-off via an external switch ǀ Switch-off of the servo mode in case of an error | Switch-off via an external switch ǀ Switch-off of the servo mode in case of an error | |
| Configuration management | Reading the ID chip ǀ Manual parameter input | Reading the ID chip ǀ Manual parameter input | Reading the ID chip ǀ Manual parameter input | |
| Supported ID chip | ID chip 2.0 | ID chip 2.0 | ID chip 2.0 | |
| Motion and control | C-887.5220 | C-887.5230 | C-887.5330 | |
| Supported sensor signal | A/B quadrature, RS-422 ǀ BiSS-C | A/B quadrature, RS-422 ǀ BiSS-C | A/B quadrature, RS-422 ǀ BiSS-C | |
| Control variables | Position | Position | Position | |
| Maximum control frequency (servo cycle) | 10000 Hz | 10000 Hz | 10000 Hz | |
| Motion types | Point-to-point motion with profile generator ǀ Cyclic transfer of target positions ǀ Wave generator | Point-to-point motion with profile generator ǀ Cyclic transfer of target positions ǀ Area scan routines ǀ Gradient search routines ǀ Wave generator | Point-to-point motion with profile generator ǀ Cyclic transfer of target positions ǀ Area scan routines ǀ Gradient search routines ǀ Wave generator | |
| Motion coordination | Coordinated multi-axis motion ǀ User-defined coordinate systems ǀ Work-and-tool coordinate systems | Coordinated multi-axis motion ǀ User-defined coordinate systems ǀ Work-and-tool coordinate systems | Coordinated multi-axis motion ǀ User-defined coordinate systems ǀ Work-and-tool coordinate systems | |
| Reference switch input | TTL | TTL | TTL | |
| Limit switch input | TTL | TTL | TTL | |
| Interfaces and operation | C-887.5220 | C-887.5230 | C-887.5330 | |
| Communication interfaces | RS-232 ǀ TCP/IP ǀ USB (only for manual control units) | RS-232 ǀ TCP/IP ǀ USB (only for manual control units) | EtherCAT slave ǀ RS-232 ǀ TCP/IP ǀ USB (only for manual control units) | |
| On/off switch | Hardware switch on/off | Hardware switch on/off | Hardware switch on/off | |
| Display and indicators | Status LED ǀ Error LED ǀ Power LED ǀ Macro LED | Status LED ǀ Error LED ǀ Power LED ǀ Macro LED | Status LED ǀ Error LED ǀ Power LED ǀ Macro LED | |
| Manual control(s) | Manual control unit with USB interface | Manual control unit with USB interface | Manual control unit with USB interface | |
| Command set | GCS 2.0 | GCS 2.0 | GCS 2.0 | |
| User software | PIMikroMove | PIMikroMove | PIMikroMove | |
| Application programming interfaces | C, C++, C# ǀ MATLAB ǀ NI LabView ǀ Python | C, C++, C# ǀ MATLAB ǀ NI LabView ǀ Python | C, C++, C# ǀ MATLAB ǀ NI LabView ǀ Python | |
| Analog inputs | 4 | 6 | 6 | |
| Analog input signal | 4 x -10 V to +10 V, 12 bit | 2 x -5 V to +5 V, 16 bit, 5 kHz bandwidth ǀ 4 x -10 V to +10 V, 12 bit | 2 x -5 V to +5 V, 16 bit, 5 kHz bandwidth ǀ 4 x -10 V to +10 V, 12 bit | |
| Digital inputs | 4 | 4 | 4 | |
| Digital input signal | TTL | TTL | TTL | |
| Digital outputs | 4 | 4 | 4 | |
| Digital output signal | TTL | TTL | TTL | |
| Industrial Ethernet protocol | — | — | EtherCAT | |
| EtherCAT device class | — | — | EtherCAT slave | |
| EtherCAT communication profile | — | — | CAN application protocol over EtherCAT (CoE) | |
| Drive profile implemented for EtherCAT | — | — | CiA402 drive profile (IEC 61800-7-201) | |
| Supported operating modes according to CiA402 | — | — | Homing mode ǀ Cyclic synchronous position mode (CSP) ǀ Safe basic state for activating coordinate systems (no mode changes / no mode selected) | |
| EtherCAT cycle time | — | — | ≥1 ms | |
| EtherCAT synchronization modes | — | — | Distributed clocks (DC) ǀ Synchronous with SYNC0 event | |
| Electrical properties | C-887.5220 | C-887.5230 | C-887.5330 | |
| Output voltage | 24 V | 24 V | 24 V | |
| Peak output current | 6000 mA | 6000 mA | 6000 mA | |
| Miscellaneous | C-887.5220 | C-887.5230 | C-887.5330 | |
| Connector hexapod power supply | M12 4-pole (f) | M12 4-pole (f) | M12 4-pole (f) | |
| Connector hexapod data transmission | HD D-sub 78 (f) | HD D-sub 78 (f) | HD D-sub 78 (f) | |
| Connector additional axes | D-sub 15 (f) | D-sub 15 (f) | D-sub 15 (f) | |
| Connector analog input | HD D-sub 26 (f) | BNC ǀ HD D-sub 26 (f) | BNC ǀ HD D-sub 26 (f) | |
| Connector digital input | HD D-sub 26 (f) | HD D-sub 26 (f) | HD D-sub 26 (f) | |
| Connector digital output | HD D-sub 26 (f) | HD D-sub 26 (f) | HD D-sub 26 (f) | |
| Connector motion stop button | M12 8-pole (f) | M12 8-pole (f) | M12 8-pole (f) | |
| Connector TCP/IP | RJ45 socket, 8P8C | RJ45 socket, 8P8C | RJ45 socket, 8P8C | |
| Connector RS-232 | D-sub 9 (m) | D-sub 9 (m) | D-sub 9 (m) | |
| Connector for supply voltage | M12 4-pole (m) | M12 4-pole (m) | M12 4-pole (m) | |
| Operating voltage | 24 V | 24 V | 24 V | |
| Power adapter | Included in the scope of delivery ǀ Power adapter 24 V DC | Included in the scope of delivery ǀ Power adapter 24 V DC | Included in the scope of delivery ǀ Power adapter 24 V DC | |
| Maximum current consumption | 7 A | 7 A | 7 A | |
| Operating temperature range | 5 to 40 °C | 5 to 40 °C | 5 to 40 °C | |
| Overall mass | 2800 g | 2800 g | 2800 g | |
| Connector EtherCAT | — | — | RJ45 socket, 8P8C |
A 12 V supply is possible for several hexapod models from PI and is useful in certain applications. If the hexapod is to be supplied with power by the controller in this case as well, you can operate the controller with a suitable 12 V power adapter. More information on request.
PI Simulation Models for CoppeliaSim / V-REP
C-887.MC2 Manual Control Unit
EtherCAT Interface of C-887 Hexapod Controllers
Motion of the Positioner. Position and Orientation in Space, Center of Rotation.
Description of Coordinate Systems for Hexapod Microrobots and Parallel-Kinematic Positioners
Description of PIHexapodEmulator software
C-887 Hexapod Controller, Models C-887.5220, C-887.5230, C-887.5330
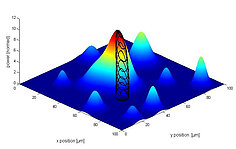
Fast Multi-Channel Photonics Alignment of Silicon Photonics Components with F-713 Alignment Systems and Hexapods from PI. PILightning Option for First Light Search
Implementing a C-887 PI Controller in TwinCAT 3.1
Updating PI Software with PIUpdateFinder
GCS Array Data Format
PIMikroMove
Information on the PIStages3 database. What must be considered when changing from PIStages2 to PIStages3.
PIPython - Programming PI Controllers with Python
PI GCS2 Driver Library for NI LabVIEW
PI Software on ARM-Based Platforms
PIVirtualMove. Simulation program for parallel-kinematic multi-axis systems
Updating controller firmware with PIFirmwareManager
Ask for a free quote on quantities required, prices, and lead times or describe your desired modification.
6-axis controller for hexapods, TCP/IP, RS-232, benchtop device, incl. control of two additional axes, motion stop
6-axis controller for hexapods, TCP/IP, RS-232, benchtop device, incl. control of two additional axes, motion stop, analog inputs
6-axis controller for hexapods, TCP/IP, RS-232, benchtop device, incl. control of two additional axes, EtherCAT interface, motion stop, analog inputs
The need to align devices down to nanoscale accuracy is arising in many fields. Optical components such as the lenses or lens assemblies in small cameras, or even the CCD chip itself, need to be positioned with ever more precision.

Digital technology opens up possibilities for improving performance in control engineering which do not exist with conventional analog technology.

Fast USB or TCP/IP interfaces as well as RS-232 are the standard interfaces supported by modern digital controllers from PI. Furthermore, PI also provides digital or analog real-time capable interfaces.