
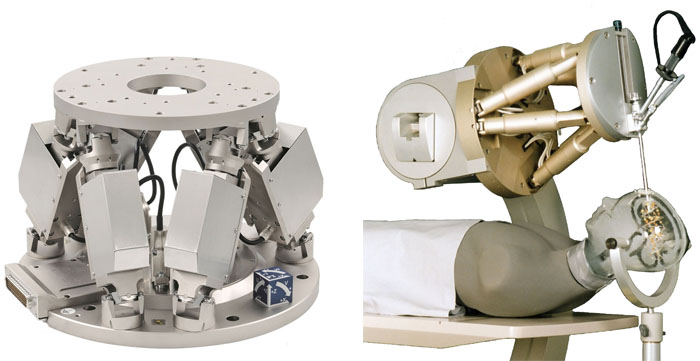
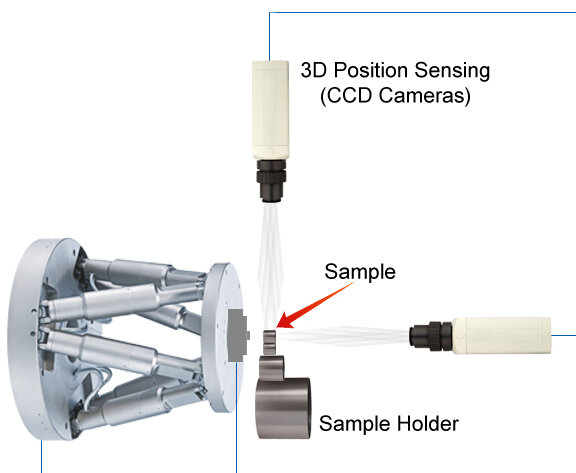
Laser micro-surgery can benefit from tracking and image-based methods that improve precision and safety. Advanced software together with stereo camera feedback allow for motion estimation reduce tracking errors. A highly precise parallel kinematics motion system (Model H-824 from Physik Instrumente) with 6 degrees of freedom was used to evaluate the performance. More information is available in this paper Stereo Vision-Based Tracking of Soft Tissue Motion with Application to Online Ablation Control in Laser Microsurgery by Institute of Mechatronic Systems at the University of Hannover, Germany.
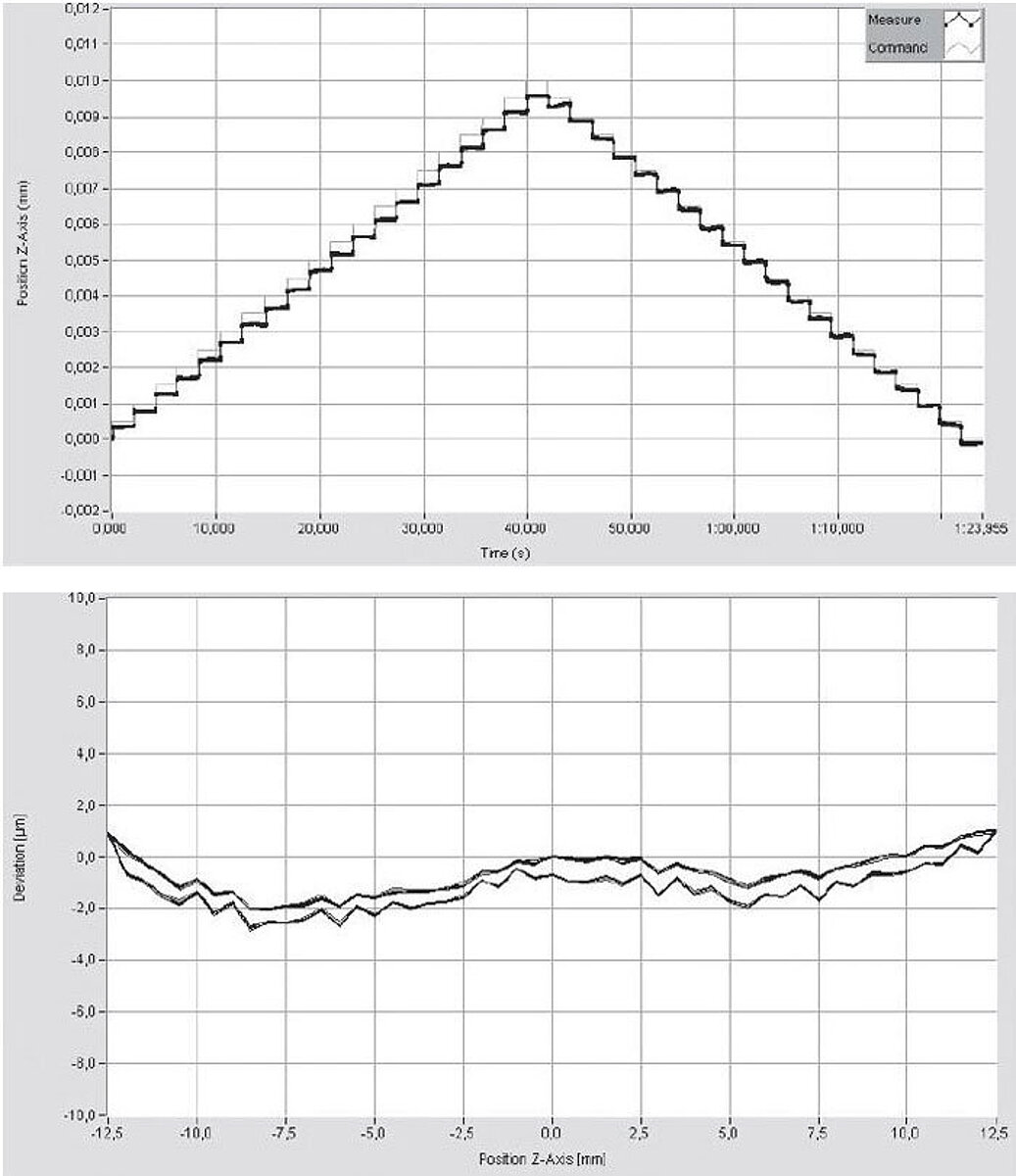
The interferometer test shows the high resolution, accuracy and repeatability of the entire travel range.
Top: Train of 500 nanometer steps.
Bottom: Bidirectional repeatability, in this case the deviation from the ideal position is only ±0.046μm.
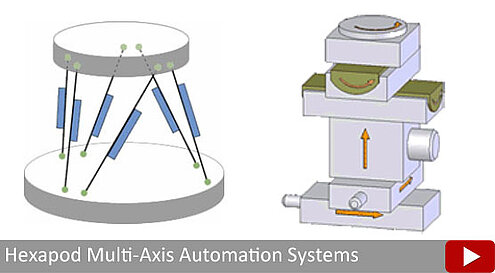
Hexapod 6-axis parallel kinematics positioners are more compact and flexible compared to traditional stacks of single axis stages. Their ability to change the pivot point with a single software command is critical to applications from aligning optics or rotating a scalpel around a certain center of rotation.
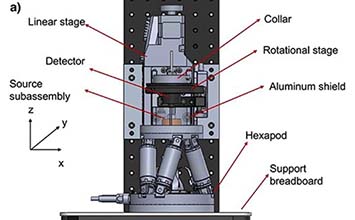
Hexapods have been used in bio-medical imaging applications, such as CT. The video above shows a multi-axis motion system consisting of a custom PI Hexapod and PRS200 Rotary stage in a setup with 3D-printed phantoms imaged repeatedly with a cone-beam computer tomography scanner. More information on this research from Johns Hopkins University is available here: https://aiai.jhu.edu/research/#phantom and here: https://jhu.pure.elsevier.com/en/publications/assessment-of-boundary-discrimination-performance-in-a-printed-ph





Blog Categories
- Aero-Space
- Air Bearing Stages, Components, Systems
- Astronomy
- Automation, Nano-Automation
- Beamline Instrumentation
- Bio-Medical
- Hexapods
- Imaging & Microscopy
- Laser Machining, Processing
- Linear Actuators
- Linear Motor, Positioning System
- Metrology
- Microscopy
- Motorized Precision Positioners
- Multi-Axis Motion
- Nanopositioning
- Photonics
- Piezo Actuators, Motors
- Piezo Mechanics
- Piezo Transducers / Sensors
- Precision Machining
- Semicon
- Software Tools
- UHV Positioning Stage
- Voice Coil Linear Actuator
- X-Ray Spectroscopy