









Advantages of Piezoelectric Positioning Systems
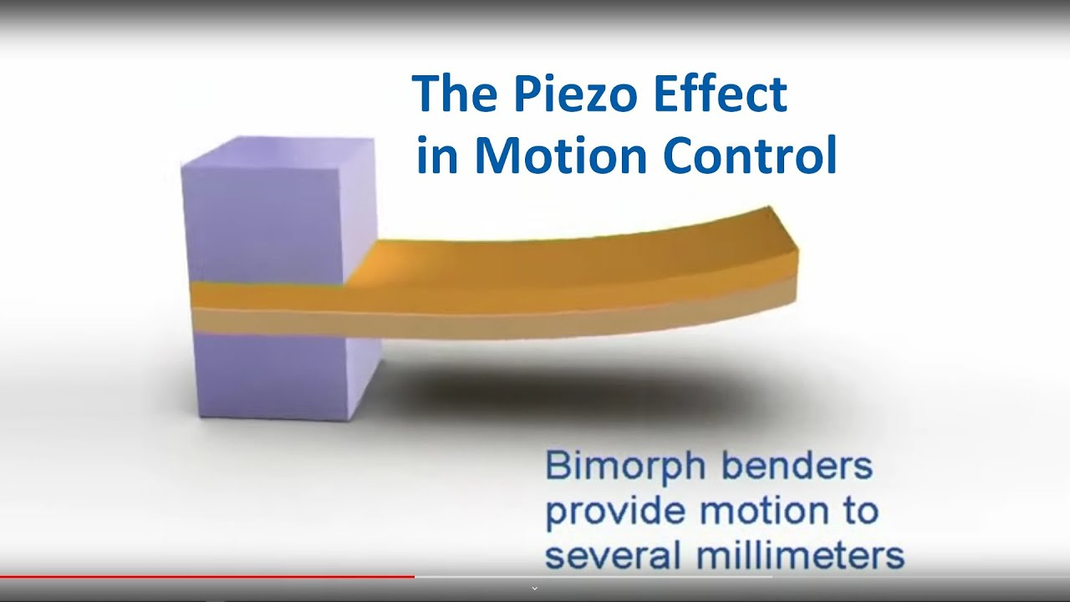
Unlimited Resolution A piezoelectric actuator (Piezo) can produce extremely fine position changes down to the subnanometer range. The smallest changes in operating voltage are converted into smooth movements. Motion is not influenced by stiction/friction or threshold voltages.
Large Force Generation
PZTs can generate a force of several 10,000 N. PI offers units that can bear loads up to several tons and position within a range of more than 100 µm with subnanometer resolution.
Fast Expansion
Piezo actuators offer the fastest response time available (microsecond time constants). Acceleration rates of more than 10,000 g's can be obtained.
No Magnetic Fields
The piezo effect is related to electrical fields. Piezo actuators don't produce magnetic fields nor are they affected by magnetic fields. They are specially well suited for applications where magnetic fields cannot be tolerated.
Low Power Consumption
The piezo effect directly converts electrical energy into motion only absorbing electrical energy during movement. Static operation, even holding heavy loads, does not consume power.
No Wear and Tear
A piezo actuator has neither gears nor rotating shafts. Its displacement is based on solid state dynamics and shows no wear and tear. PI has conducted endurance tests on PZTs in which no change in performance was observed after several billion cycles.
Vacuum and Clean Room Compatible
Piezo actuators are ceramic elements that do not need any lubricants and show no wear and abrasion. This makes them clean room compatible and ideally suited for Ultra High Vacuum applications.
Operation at Cryogenic Temperatures
The piezo effect is based on electric fields and functions down to almost zero Kelvin (with reduced specifications).

Applications for Piezo Motion Devices
Optics, Photonics and Measuring Technology
| Precision Mechanics and Mechanical Engineering
|
Life Science, Medicine, Biology
| Microelectronics
|
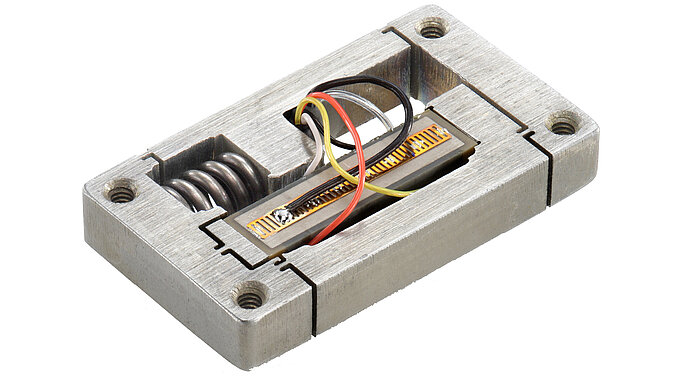
Many precision motion systems are dependent on the speed and accuracy of piezo devices. PI offers the largest selection of research and industrial grade Piezo Positioners, Actuators, Translators, Piezo Flexure NanoPositioners & Scanners and Piezo Tip/Tilt Platforms worldwide. In addition to the hundreds of standard positioning systems, custom designs are available . PI's highly vertically integrated structure allows control of each manufacturing step from the fine-tuning the piezoelectric effect in the raw material to finished nano-positioning systems with software and digital control.
Glossary
Actuator:
A device that produces motion (displacement).
Blocked force:
The maximum force an actuator can generate if blocked by an infinitely rigid restraint.
Ceramic:
A polycrystalline, inorganic material.
Closed loop operation:
The actuator is used with a position sensor, providing feedback to the position servo controller compensating for nonlinearity, hysteresis and creep (see open loop).
Compliance:
Strain produced per unit stress. The reciprocal of stiffness.
Creep:
An unwanted positive or negative increase in the displacement over time.
Curie Temperature:
The temperature at which the crystalline structure changes from a piezoelectric (non-symmetrical) to a non-piezoelectric (symmetrical) form. At this temperature Piezo ceramics looses the piezoelectric properties.
Domain:
A region of electric dipoles with similar orientation.
Drift:
See creep
HVPZT:
Acronym for High Voltage Piezo (actuator).
Hysteresis:
Hysteresis is based on crystalline polarization effects and molecular friction and occurs when reversing direction. Hysteresis is not to be confused with backlash.
LVPZT:
Acronym for Low Voltage Piezo (actuator).
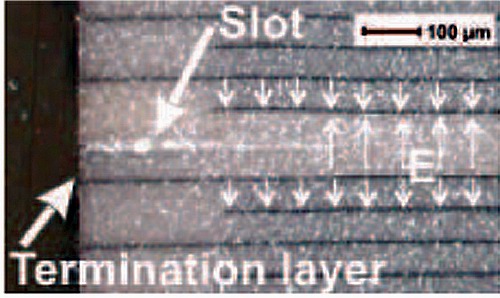
Multilayer actuator:
An actuator manufactured in a fashion similar to multilayer ceramic capacitors. Active ceramic material and electrode material are "co-fired" in one step. Layer thickness is typically on the order of 20 to 100 µm.
Open loop operation:
The actuator is used without a position sensor. Displacement roughly corresponds to the drive voltage. Creep, nonlinearity and hysteresis are not compensated for.
Piezoelectric Materials:
Materials that change their Dimensions when a voltage is applied and produce a charge when pressure is applied.
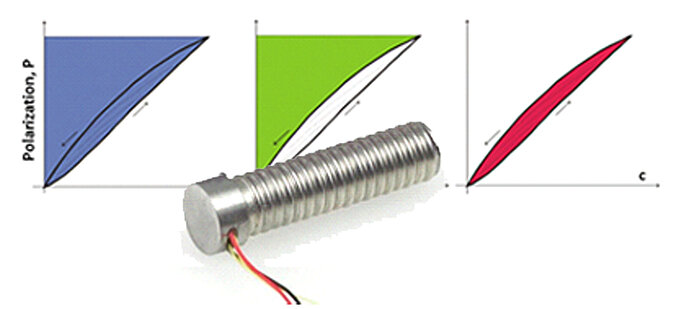
Polarization:
The electric orientation of molecules in a piezoelectric material.
Piezo:
Acronym for Plumbum (lead) Zirconate Titanate. Polycrystalline ceramic material with piezoelectric properties. Often used as acronym for piezo translator.
Stiffness:
The spring constant (of a piezo actuator).
Translator:
An actuator that produces linear motion (displacement).
Units and Dimensions
A: Surface area [m²] (meter²)
α: Coefficient of Thermal Expansion (CTE) [K-1] (1/Kelvin)
C: Capacitance (Farad) [As/V] (Ampere x second / Volt)
dij: Piezo modulus (tensor components) [m/V] (meter/Volt)
ds: Distance, thickness [m] (meter)
ε: Dielectric constant [As/Vm] (Ampere x Second / Volt x meter)
E: Electric field strength [V/m] (Volt/meter)
f: Operating frequency [Hz] (Hertz, 1/second)
F: Force [N] (Newton)
f0: Unloaded resonant frequency [Hz] (Hertz, 1/second)
g: Acceleration due to gravity: 9.81 m/s2 (meter/second²)
i: Current [A] (Ampere)
kS: Stiffness of restraint [N/m] (Newton/meter)
kT: Stiffness of piezo actuator [N/m] (Newton/meter)
L0: Length of non energized actuator [m] (meter)
LR: Reduction of displacement [m] (meter)
ΔL: Change in length [m] (meter)
ΔL0: Max. nominal displacement without applied force [m] (meter)
m: Mass [kg] (kilogram)
P: Power [W] (Watt)
Q: Charge [C] (Coulomb)
S: Strain [DL/L] (without Dimensions)
t: Time [s] (second)
U: Voltage [V] (Volt)
Up-p: Peak-peak voltage [V] (Volt)
If you have any questions, ask a PI engineer for help.