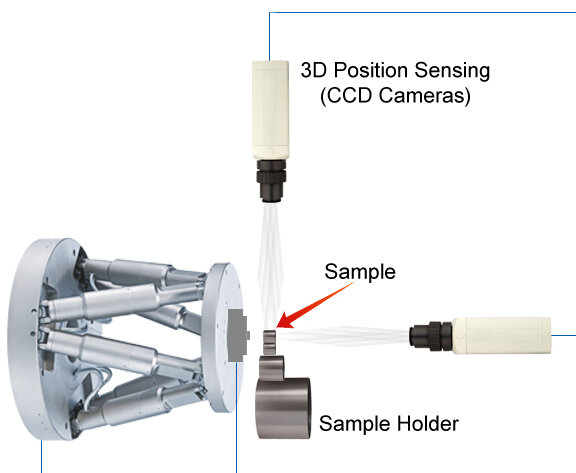
The extra legs contain redundant sensors which enable immediate corrective measures in the unlikely event of failure of the standard measuring systems.
PI's years-long experience with the development and production of 6-axis Hexapod micropositioning systems served as the basis for the next step: the Nonapod. What at first might seem just high-tech fun and games has, in fact, far greater significance. The three "extra" legs are not just there to complicate controller programming with overdetermination, but to increase reliability. The Hexapod system was developed for use as a medical robot — an application where reliability is of the essence.
General information on Hexapods.


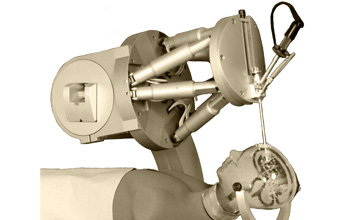
Hexapod for Spine Surgery / Surgical Robot / Computer Aided Surgery
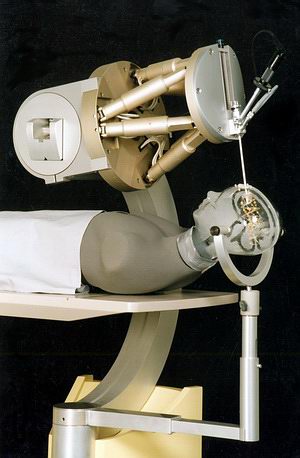
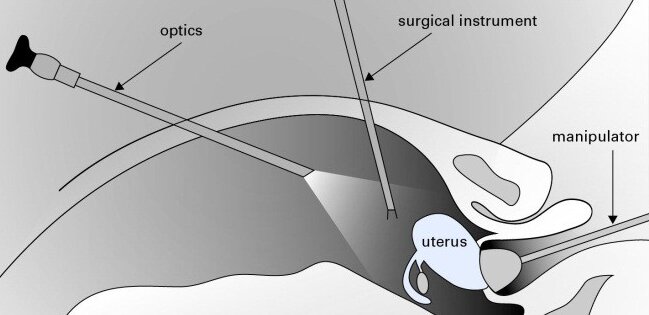
The Fraunhofer-Institut für Produktionstechnik und Automatisierung (IPA), Stuttgart, Germany, has realized the first functional prototype robot for spine surgery. The principal goals of the new technology are increased safety of micro-surgical procedures and feasibility of micro-therapy. An ideal mechanical solution was found in the PI M-850 Hexapod, a six-degree-of freedom parallel-kinematics micropositioning system. Providing higher stiffness, load capacity and accuracy in a smaller package than conventional "stacked" multi-axis positioners, the hexapod principle allows sub-micron precision even under high loads.
The hexapod which serves as modular platform for different instruments, such as endoscopes, is controlled by a cockpit similar to a flight simulator. The cockpit also enhances the surgeon's spatial understanding of the operation site, the endoscope's position and speed. IPA engineers consider this novel system the first step towards the ergonomic operating room of the future. Special thanks to Prof. Westkämper and Dr. Thomas Weisener of IPA for supplying the information and graphics.
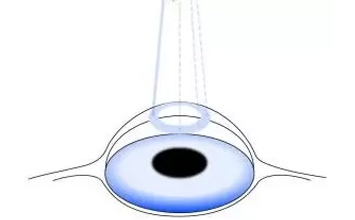
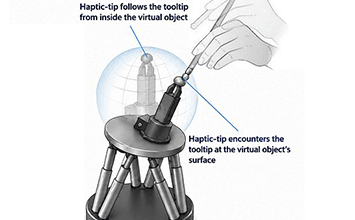
Recent Research at the UK’s Kings College has suggested a robotic system for vitreoretinal surgery based on two H-825 hexapod 6-axis parallel robots.
General information on Hexapods.


This is a legacy product that may have limited availability or may have been replaced. Ask a PI engineer for an equivalent new model.