Interfaces for Standard PI Hexapod Controllers
- EtherCat Option
- Manual Control Pad
- TCP/IP Ethernet Industry standard
- RS-232 (25m short connection)
- RS-422 (optional, for up to 1.4 km long distance)
- Analog Input (optional)
- Optical Input (optional)
- Keyboard (optional)
- Monitor (optional)
Software Components / External Control
- Library files for Windows and Linux Operating Systems / DLLs
- LabView VI’s full set
- PIMikroMove program integration
- Additional scan routines
- Additional auto alignment routines (e.g. photonics alingment & test equipment)
- Worldwide remote control via ethernet
- Flight Simulator Interface with Demo Software
EtherCat Fieldbus Interface for Automation and Micro-Machining
A new controller with EtherCAT fieldbus interface extends the hexapod versatility for automation and precision machining applications. It can be integrated seamlessly into automation systems in industry and research, the controller performs all coordinate transformations for parallel kinematics in firmware. A higher-level PLC master controller (EtherCAT master with CoE protocol) is required, but operation is also possible via TCP/IP or RS-232 without PLC master.
Command Set / Operating Systems / Libraries
The native command set comprises about 40 commands and is is compatible to PI's General Command Set and includes extremely fast scan and align routines for different alignment tasks. All Hexapod controllers come with a complete software package for Windows and Linux operating systems. Alternatively, they can be run in stand-alone mode with an optional integrated key pad and monitor or by means of an external keyboard and monitor
Custom software can communicate by ASCII strings, or, more conveniently, through included library files (Windows DLLs, Linux libraries) or LabVIEW drivers. Most controllers can be upgraded with optical boards for alignment of IR and Visible light sources.
PIMikroMove Software
- See and control all connected controllers and mechanical axes in one window
- HostMacros: create command sequences for connected controllers and run them on the host PC, can be called recursivly
- Position Pad: control 2 axes with mouse and joystick
- 3D visualisation of connected hexapod geometry
- Analog input visualisation
Hex_GCS_DLL
- Allows controlling one or more PI Hexapod controllers connected to a host PC
- Is available for the following operating systems:
- Windows 2000, XP and Vista
- Linux operating systems
- Sample program with open source code
- Supports all functions available in firmware
- Very convenient for programming in C, C++, VB, C#…
LabVIEW Drivers
- Including GUI programs such as terminal applications, configuration software, full scanning routines with graphical representation etc.
- Online help window for each VI
- Compatible with PI's General Command LabVIEW Driver Set

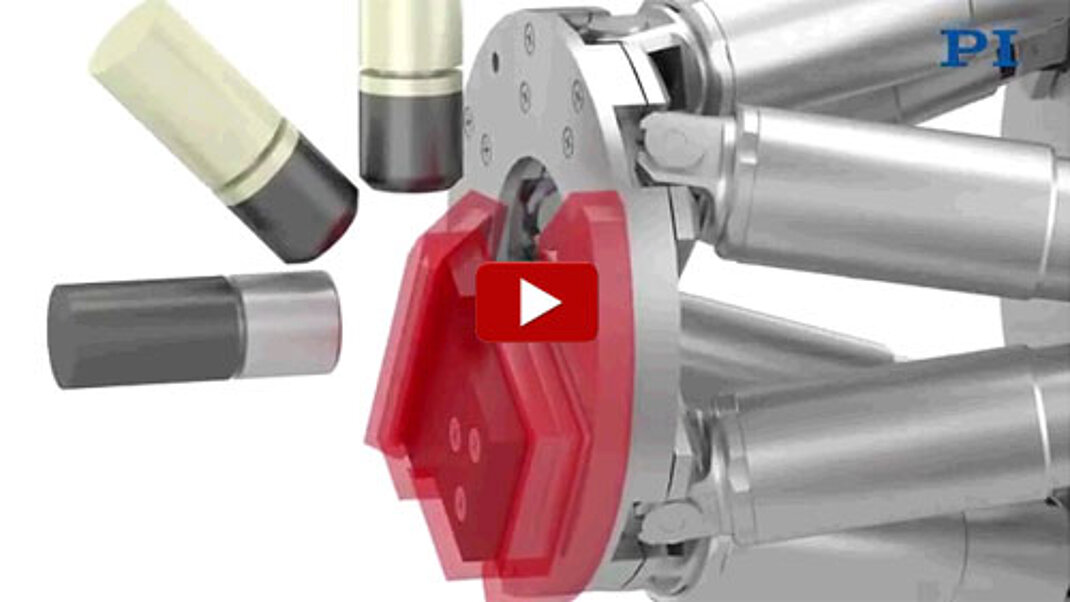
User Defined Pivot Point
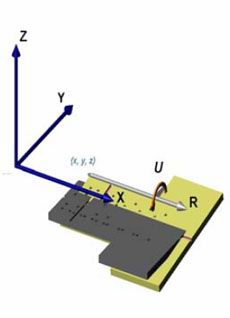
PI Hexapod 6DOF motion platform controllers allow the user to set a pivot point anywhere in space. It is important to have a fixed pivot point as the center of rotation especially in photonics alignment & packaging applications. Furthermore, the cartesian coordinates of any position and any orientation can be entered directly and the specified target will be reached after travel along a smooth path.

Hexapod Options & Accessories Optical Metrology / Power Meters
The F-712.PM1 optical power meter provides high bandwidth, high resolution information to the hexapod controller's analog input, for fast and precise automatic photonic alignment applications.
PIMotion&Vision™—Integration of Vision System and Motion Control
PIMotion&Vision™ offers an integrated solution for difficult tasks such as automated positioning of optics, semi-conductor wafers, microsystems technology MEMS fabrication or alignment and scanning of samples under a microscope. The advantage is one consistent software interface for both motion and vision, based on National Instruments LabVIEW + IMAQ Vision, offering a general coordinate system and flexible modules like AutoFocus, FindCorner, AlignEdges for easy handling of a complex system.
Interactive 6-Axis Manual Control Pad Upgrade
The C-887.MC 6DOF manual control pad facilitates system setup and testing procedures. It consists of a board that plugs into the Hexapod controller and a control pad with six digital "potentiometer" knobs (one for each degree of freedom).
The manual pad works seamlessly with the Hexapod software, and allows programmable step sizes of 0.1 µm to 500 µm (linear) and 0.0001 to 0.5deg (angular) per step. Computer commanded steps can be intermixed with manual positioning input maintaining the true position inside the position registers of the Hexapod controller. The control pad comes with a 3 m cable.
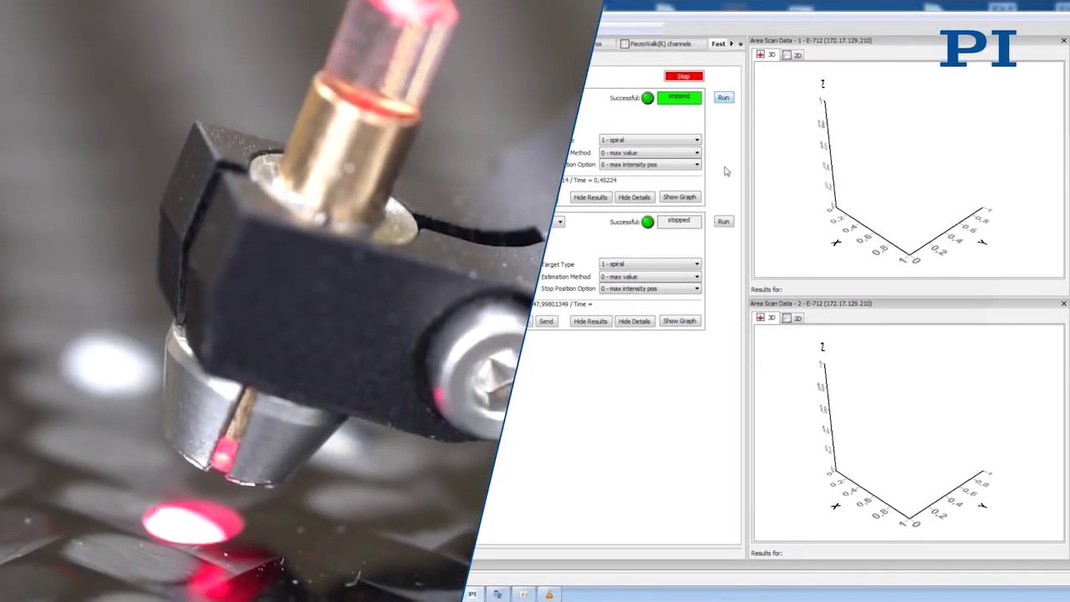
Fast Piezo Scanner Option for Rapid Nano-Alignment
For applications where alignment with nanometer-range resolution is required, or where rapid mapping of the entire cross-section of a component in as short a time as possible is desired, a piezo scanner can be used.

Hexapod 6-Axis Motion Controller Introduction
All PI Hexapod (Stewart Platform) 6DOF motion controllers are based on decades of experience with high-precision parallel kinematic mechanics. They are delivered with ample software support, including a simulation tool to verify workspace and loads on individual struts dependent on mounting orientation.
In addition to the coordinated output of the six hexapod axes, standard motion controllers provide two additional axes that can be used to operate rotary stages, linear stages or linear actuators.
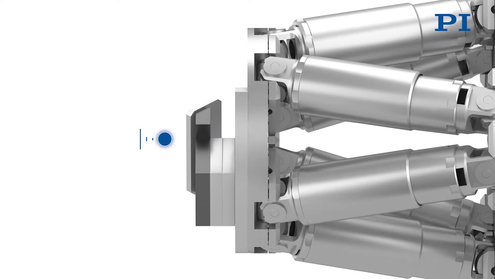
Virtualized Pivot Point
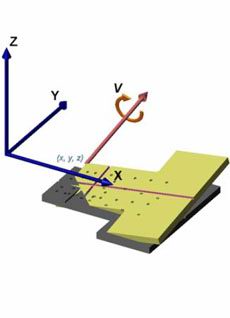
All PI 6DOF Hexapod Stewart platform controllers allow the user to set a pivot point anywhere in space with one simple command. Software control of the center of rotation is critical in many alignment tasks, from photonics applications to precision assembly. PI controllers make hexapod control easy for the user. Positions are entered / programmed in the cartesian coordinates and the controller takes care of the rest -- the specified target will be reached after travel along a smooth vectorized path.







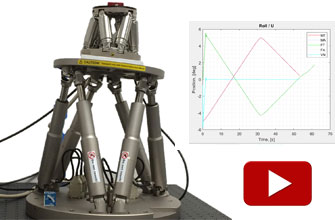
")

 and U=1-; U axis is always parallel to X.")
Platform in INI position
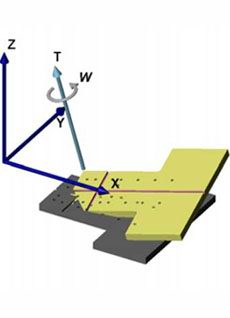
Platform position (x, y, z). U=10 V=-10and W=10; note direction of the W axis, always normal to platform.

Hexapod manual control pad facilitates system setup and testing procedures. It permits independent motion in all degrees of freedom with programmable step size.


Custom Hexapod Controllers
In addition to the standard hexapod controllers / software packages, PI has also designed a number of controllers for customer specific applications

, AC- motor driver support, brake support, incremental sensor and absolute incremental sensor on second interface")


, Case: 10.5x3.5x10”")