


Application Examples
Photonic Packaging Optical Device Testing, MEMS Positioning/Alignment, Fiber Alignment, Micromachining, Micro-Manipulation (Life Sciences), Semiconductor Handling Systems, Microsurgery
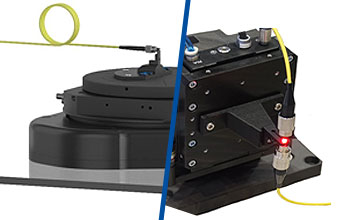
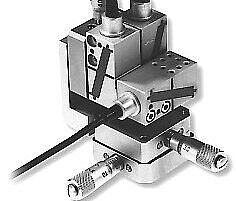
The PI F-206 Six Axis Motorized MicroPositioning Fiber Alignment Stage for automated photonics alignment is based on a high precision hexapod multi-axis stage and a high performance controller with automated alignment routines. It provides six degrees of freedom, 100 nanometer resolution and allows the user to define the pivot-point anywhere inside or outside the F-206 envelope. Rotation about that pivot point can be specified for any axis of rotation.
The successors of the F-206 are shown below:
The F-206 multi-axis motorized fiber alignment stage is considerably more compact and accurate than conventional multi-axis stage stacks. Its novel motorized parallel kinematics design (see Principles of Operation) and powerful all-digital controller automatically compensate for unwanted and parasitic motions. It is immune to orthogonality and crosstalk issues that are a formidable assembly and service concern for stacked units.
There are none of the servo-tuning and dynamical setup procedures necessitated by the widely varying effective loads of stages in a stacked assembly. The F-206 is truly a plug-and-play motion system that requires no servo adjustment or tuning. Its operation is fast and crisp, with identical dynamics regardless of the direction of motion.
Features
- Compact, Low-Profile Six-Axis Micro-Robot
- 0.1 µm Linear Resolution, 2 µrad Angular Resolution – Ideal for Demanding Applications
- Automatic Path Planning
- Fully Virtualized Center-of-Rotation – Pivot About any Point in Space:
- Fiber Endface
- Lens Focal Point
- Laser Beam Waist…
- Automatic Alignment (Transverse and Angular)
- High-Speed and Fast Settling
- Digital Controller with Built-in Photometer, or Compatible with External Metrology
- LabView(TM) Drivers, DLL Libraries...
Principles of Operation
The basic operating principle of the F-206 is related to the hexapod principle. Unlike hexapods with variable length struts ("legs") the F-206 features con-stant length struts. This concept provides the follow-ing advantages over "classical" variable strut length hexapods:
- Reduced size
- Reduced inertia for further improved dynamic performance
- Independent, modular, identical drive/strut units simplifies assembly and service
All six struts are driven by individual industrial class servo motors and encoders, situated in one plane.

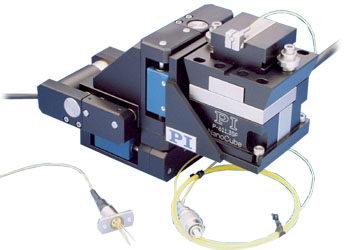
Virtualized Rotation Capability
A highly useful feature is the F-206's fully virtualized rotation capability. Since its motion is not defined by fixed bearings but rather by sophisticated real-time 6-space control algorithms, you can define any point in space to be the center of rotation with a single software command. This is ideal for angular alignment of fibers since it is easy to set the pivot point to prevent "walking" of the fiber as its tip/tilt orientation is optimized.
All commands and operations are high-level using human-readable units (mm, degrees) and coordinates (X, Y, Z, θX, θY, θZ ). The F-206 automatically manages its path planning and coordination of its six motors. An integrated photometer and built-in automatic alignment procedures add to its power in photonic packaging applications.
Software
Control of the F-206 is facilitated by the controller's open software architecture providing a variety of high level commands for minimized communication overhead & bandwidth. Other F-206 features are:
- Integrated Scan & Automatic Alignment Functions
- LabView (TM) Drivers and DLL Libraries
- Simulation Tools Terminal Software


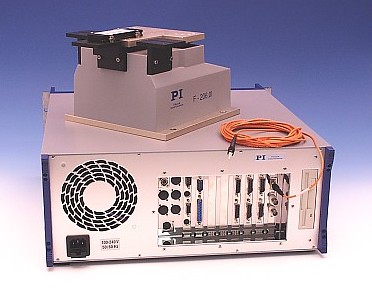
Controller
- Digital Multi-Axis Servo Controller
- Built-in Photometer
- Built-In 12-bit Analog Input Port
- Wide Range Power Supply (100-240 V, 50/60 Hz)
- Optional Manual Controls (Keyboard/Monitor)
- Easy Firmware Update Function
- Well Documented Compact RS-232 High Level Command Set
Manual Control Option
The F-206.MC6 option is a useful addition for simplifying test and setup procedures. It consists of a board that plugs into the F-206 controller and a control pad with six digital "potentiometer" knobs (one for each degree of freedom). The control pad allows manual step-by-step operation of the platform with a programmable step size.
External positioning input (via the RS-232 interface) can be mixed with manual positioning input. Both operate on the same position registers of the F-206 controller.
ORDERING INFORMATION:
F-206k001 Parallel Kinematics Six Axis Micro Positioning & Alignment System, IR Optic Input
F-206.MC6 Option Manual Control for F-206
| TECHNICAL DATA: F-206 | |||
Models | F-206 | Units | |
Travel X, Y, Z * | ± 6 | mm | |
Travel Q X, Q Y, Q Z * | ± 5 | deg | |
Min. Incremental Motion X, Y, Z | 0.1 | µm | |
Design Resolution | 0.03 | µm | |
Max. Velocity X, Y, Z | 10 | mm/sec | |
Load capacity (centered) | 2 | kg | |
* The travel ranges of the individual coordinates (X,Y,Z, θX,θY,θZ) are interdependent. The data in this table show maximum travel for each individual axis. If motion in more than one axis is desired, the individual travel ranges given in this table are reduced.



This is a legacy product that may have limited availability or may have been replaced. Ask a PI engineer for an equivalent new model.
Photonics Active Alignment Systems Overview Hexapod 6-DOF Motion Platforms