P-611.20
XY nanopositioner; 120 µm × 120 µm travel range (open loop) (X × Y); LEMO connectors; 1.5 m cable length

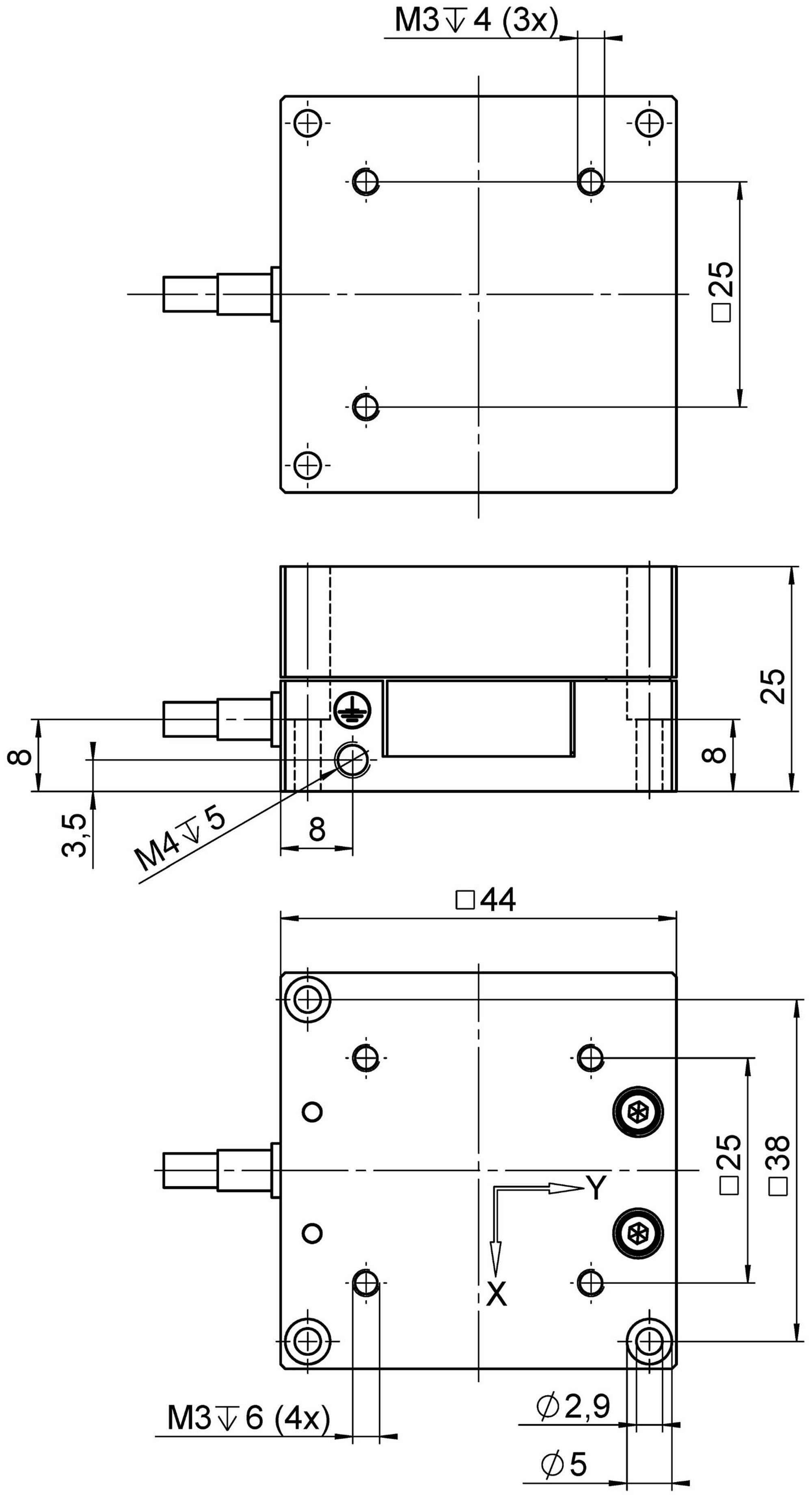
P-611.2S, dimensions in mm. Note that a comma is used in the drawings instead of a decimal point.
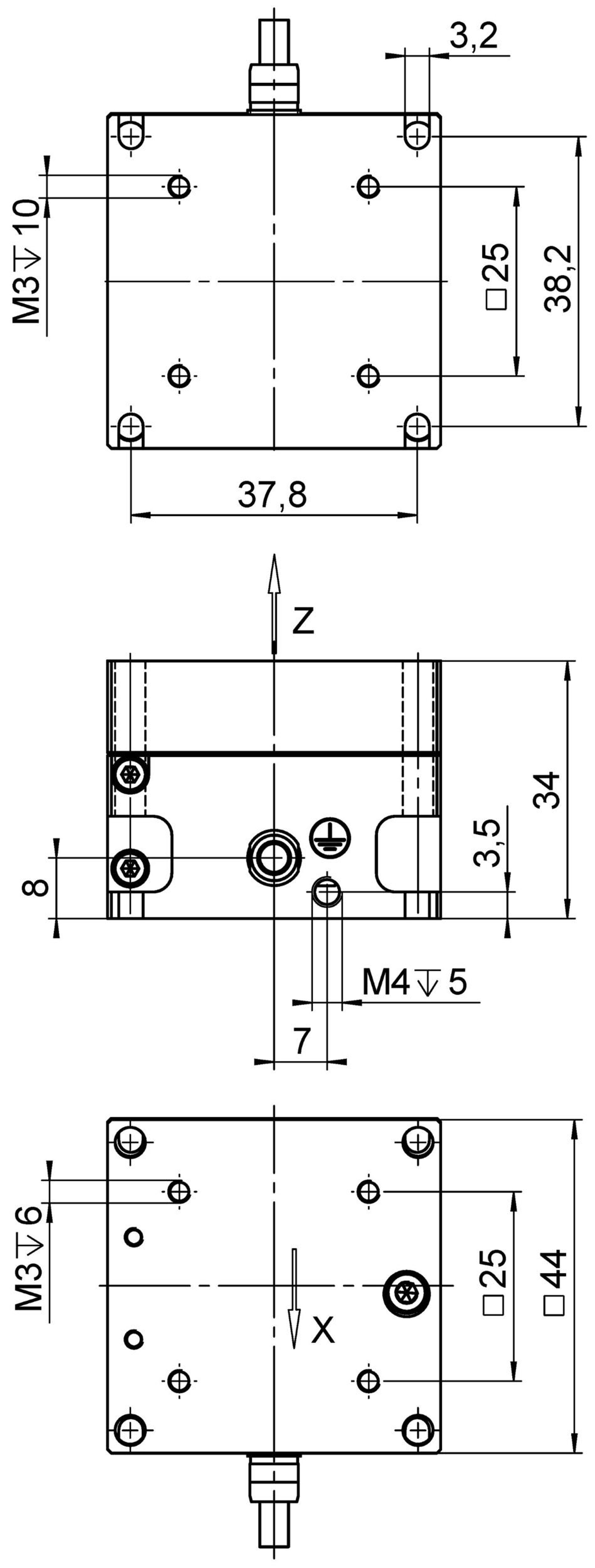
P-611.XZS, dimensions in mm. Note that a comma is used in the drawings instead of a decimal point.



Application fields
Outstanding lifetime thanks to PICMA® piezo actuators
The PICMA® piezo actuators are all-ceramic insulated. This protects them against humidity and failure resulting from an increase in leakage current. PICMA® actuators offer an up to ten times longer lifetime than conventional polymer-insulated actuators. 100 billion cycles without a single failure are proven.
| Motion | P-611.20 | P-611.2S | P-611.XZ0 | P-611.XZS | Tolerance |
|---|---|---|---|---|---|
| Active axes | X Y | X Y | X Z | X Z | |
| Travel range in X, open loop, at -20 to 120 V | 120 µm | 120 µm | 120 µm | 120 µm | +20 / -0 % |
| Travel range in Y, open loop, at -20 to +120 V | 120 µm | 120 µm | +20 / -0 % | ||
| Pitch (Rotational crosstalk in θX with motion in Y) | ± 5 µrad | ± 5 µrad | ± 5 µrad | ± 5 µrad | typ. |
| Pitch (Rotational crosstalk in θY with motion in X) | ± 5 µrad | ± 5 µrad | ± 5 µrad | ± 5 µrad | typ. |
| Yaw (Rotational crosstalk in θZ with motion in X) | ± 20 µrad | ± 20 µrad | ± 20 µrad | ± 20 µrad | typ. |
| Yaw (Rotational crosstalk in θZ with motion in Y) | ± 10 µrad | ± 10 µrad | typ. | ||
| Travel range in X | 100 µm | 100 µm | |||
| Travel range in Y | 100 µm | ||||
| Linearity error | 0.1 % | 0.1 % | typ. | ||
| Travel range in Z, open loop, at -20 to 120 V | 120 µm | 120 µm | +20 / -0 % | ||
| Yaw (Rotational crosstalk in θX with motion in Z) | ± 10 µrad | ± 10 µrad | typ. | ||
| Pitch (Rotational crosstalk in θY with motion in Z) | ± 10 µrad | ± 10 µrad | typ. | ||
| Travel range in Z | 100 µm | ||||
| Positioning | P-611.20 | P-611.2S | P-611.XZ0 | P-611.XZS | Tolerance |
| Resolution, open loop | 0.2 nm | 0.2 nm | 0.2 nm | 0.2 nm | typ. |
| Unidirectional repeatability in X | ± 10 nm | ± 10 nm | typ. | ||
| Unidirectional repeatability in Y | ± 10 nm | typ. | |||
| Integrated sensor | SGS, indirect position measuring | SGS, indirect position measuring | |||
| System resolution | 2 nm | 2 nm | typ. | ||
| Unidirectional repeatability in Z | ± 10 nm | typ. | |||
| Drive Properties | P-611.20 | P-611.2S | P-611.XZ0 | P-611.XZS | Tolerance |
| Drive type | PICMA® | PICMA® | PICMA® | PICMA® | |
| Electrical capacitance | 1,5 µF | 1,5 µF | 1,5 µF | 1,5 µF | ±20 % |
| Mechanical Properties | P-611.20 | P-611.2S | P-611.XZ0 | P-611.XZS | Tolerance |
| Stiffness in X | 0.2 N/µm | 0.2 N/µm | 0.2 N/µm | 0.2 N/µm | ±20 % |
| Stiffness in Y | 0.2 N/µm | 0.2 N/µm | ±20 % | ||
| Resonant frequency in X, unloaded | 345 Hz | 345 Hz | 365 Hz | 365 Hz | ±20 % |
| Resonant frequency in X, under load with 30 g | 270 Hz | 270 Hz | 280 Hz | 280 Hz | ±20 % |
| Resonant frequency in X, under load with 100 g | 180 Hz | 180 Hz | 185 Hz | 185 Hz | ±20 % |
| Resonant frequency in Y, unloaded | 270 Hz | 270 Hz | ±20 % | ||
| Resonant frequency in Y, under load with 30 g | 225 Hz | 225 Hz | ±20 % | ||
| Resonant frequency in Y, under load with 100 g | 165 Hz | 165 Hz | ±20 % | ||
| Permissible push force in X | 15 N | 15 N | 15 N | 15 N | max. |
| Permissible push force in Y | 15 N | 15 N | max. | ||
| Permissible push force in Z | 15 N | 15 N | 15 N | 15 N | max. |
| Permissible pull force in X | 10 N | 10 N | 10 N | 10 N | max. |
| Permissible pull force in Y | 10 N | 10 N | max. | ||
| Overall mass | 235 g | 235 g | 270 g | 270 g | ±5 % |
| Material | Aluminum, steel | Aluminum, steel | Aluminum, steel | Aluminum, steel | |
| Stiffness in Z | 0.35 N/µm | 0.35 N/µm | ±20 % | ||
| Resonant frequency in Z, unloaded | 340 Hz | 340 Hz | ±20 % | ||
| Resonant frequency in Z, under load with 30 g | 295 Hz | 295 Hz | ±20 % | ||
| Resonant frequency in Z, under load with 100 g | 230 Hz | 230 Hz | ±20 % | ||
| Permissible pull force in Z | 10 N | 10 N | max. | ||
| Miscellaneous | P-611.20 | P-611.2S | P-611.XZ0 | P-611.XZS | Tolerance |
| Operating temperature range | -20 to 80 °C | -20 to 80 °C | -20 to 80 °C | -20 to 80 °C | |
| Connector | LEMO FFA.00.250.CTAC22 | LEMO FFA.00.250.CTAC22 | LEMO FFA.00.250.CTAC22 | LEMO FFA.00.250.CTAC22 | |
| Cable length | 1.5 m | 1.5 m | 1.5 m | 1.5 m | ±10 mm |
| Recommended controllers / drivers | E-503, E-505, E-663, E-664, E-727 | E-503, E-505, E-663, E-664, E-727 | E-503, E-505, E-663, E-664, E-727 | E-503, E-505, E-663, E-664, E-727 | |
| Sensor connector | LEMO FFA.0S.304.CLAC32 | LEMO FFA.0S.304.CLAC32 |
The resolution of the system is limited only by the noise of the amplifier and the measuring technology because PI piezo nanopositioning systems are free of friction.
P-611 Nanopositioning Systems with Strain Gauge Sensors / without Sensor
Unpacking and Handling of P-611 Positioners
Ask for a free quote on quantities required, prices, and lead times or describe your desired modification.
XY nanopositioner; 120 µm × 120 µm travel range (open loop) (X × Y); LEMO connectors; 1.5 m cable length
XY nanopositioner; 100 µm × 100 µm travel range (X × Y); SGS, indirect position measuring; LEMO connectors; 1.5 m cable length
XZ nanopositioner; 120 µm × 120 µm travel range (open loop) (X × Z); LEMO connectors; 1.5 m cable length
XZ nanopositioner; 100 µm × 100 µm travel range (X × Z); SGS, indirect position measuring; LEMO connectors; 1.5 m cable length

Highly reliable and extended lifetime through the patented manufacturing process for multilayer actuators.
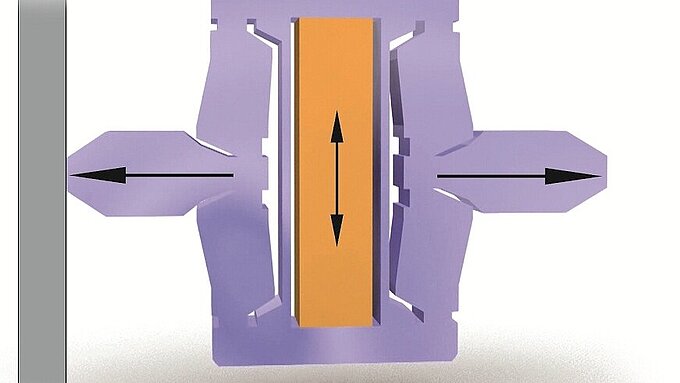
Flexure guides from PI have proven their worth in nanopositioning. They guide the piezo actuator and ensure a straight motion without tilting or lateral offset.







