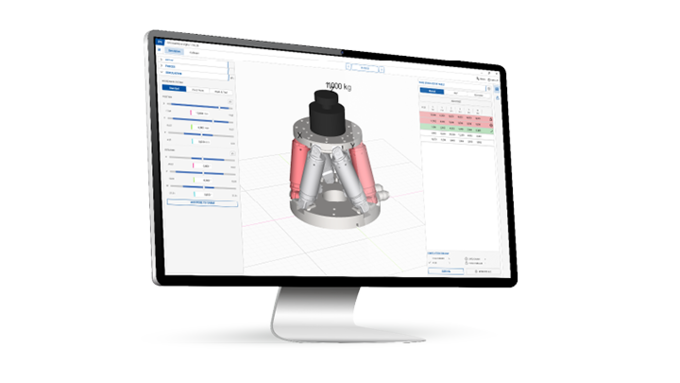
Flexible Multi-axis Granite Motion System for System Integrators and Machine Builders Comes with High-dynamics Linear Motor Stages and EtherCat-based Motion Controller
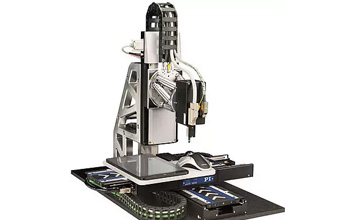
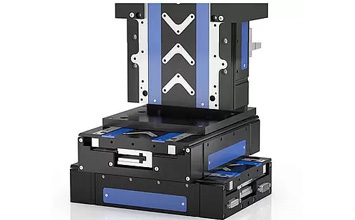
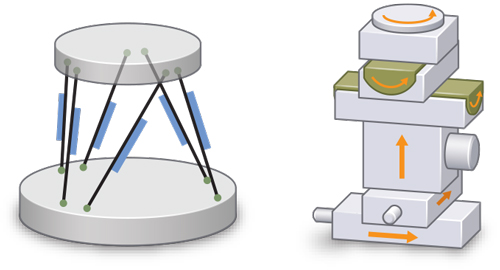
Several types of multi-axis stage combinations, including gantries and granite-based motion systems