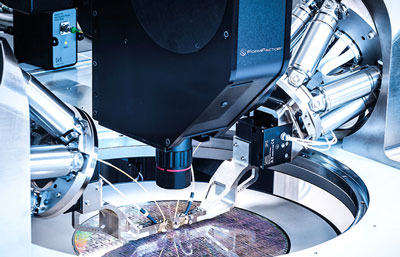
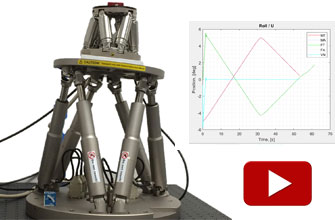
Manufacturing and quality assurance processes in electronics production, mechanical engineering, and the automotive industry increasingly rely on precision multi-axis positioning and alignment systems. Parallel-kinematic hexapod robots have many advantages compared to traditional serial kinematics multi-axis motion systems. They are available for loads from a few 100g to several tons and are used to precisely position tools, workpieces, and complex components in any spatial orientation with micron and sub-micron accuracy and repeatability – regardless of the assembly orientation.
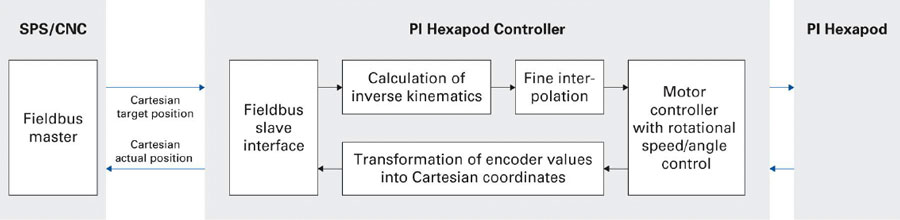
The latest generation of PI hexapod controllers with integrated EtherCAT interface now make it very easy for users to integrate hexapods into automation systems without the need for to perform challenging kinematic transformations.


The EtherCAT communication is based on the CANopen over EtherCAT (CoE) protocol and therefore offers the same communication mechanisms that are defined in the CANopen standard according to EN 50325-4. The minimum permissible cycle time for the hexapod controller is one millisecond. The Object Dictionary, Process Data Object (PDO) Mapping, and Service Data Objects (SDO) are supported.
PDOs and SDOs have been defined according to drive profile CiA402 in order to allow easy integration of the Cartesian axes of the hexapod within the PLC.







Blog Categories
- Aero-Space
- Air Bearing Stages, Components, Systems
- Astronomy
- Automation, Nano-Automation
- Beamline Instrumentation
- Bio-Medical
- Hexapods
- Imaging & Microscopy
- Laser Machining, Processing
- Linear Actuators
- Linear Motor, Positioning System
- Metrology
- Microscopy
- Motorized Precision Positioners
- Multi-Axis Motion
- Nanopositioning
- Photonics
- Piezo Actuators, Motors
- Piezo Mechanics
- Piezo Transducers / Sensors
- Precision Machining
- Semicon
- Software Tools
- UHV Positioning Stage
- Voice Coil Linear Actuator
- X-Ray Spectroscopy