Linear Motor Stages - Performance of Direct-Driven Linear Motors in Precision Positioning Applications

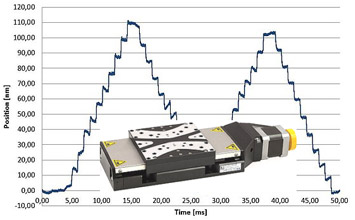
Brushless direct drive linear motors provide advantages over leadscrew and ballscrew driven positioning stages when it comes parameters such as acceleration, maximum speed, accuracy, constancy of velocity, and avoidance of vibration. This article explains types of motors, encoders and provides test data of PI’s new V-551 linear motor stage.

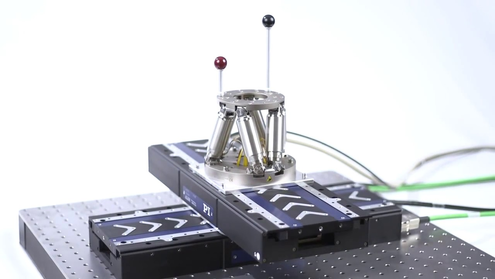
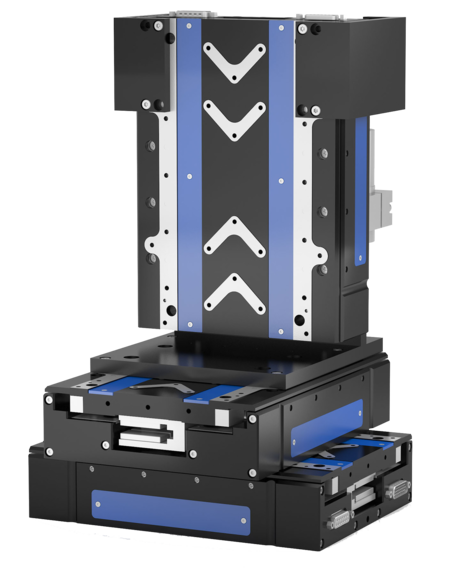
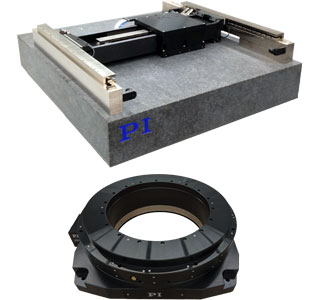
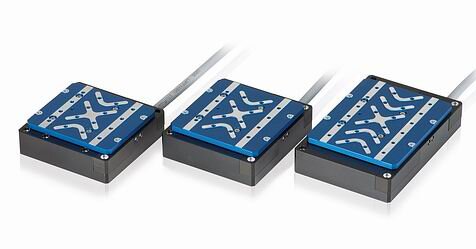
Linear motor stages, come in different sizes, and are available with absolute and incremental encoders.
Left: V-551 linear motor stages
Right: V-738 Linear Motor XY stage with aperture
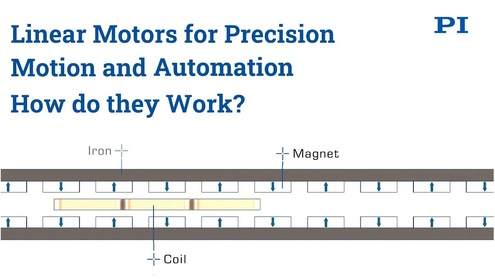
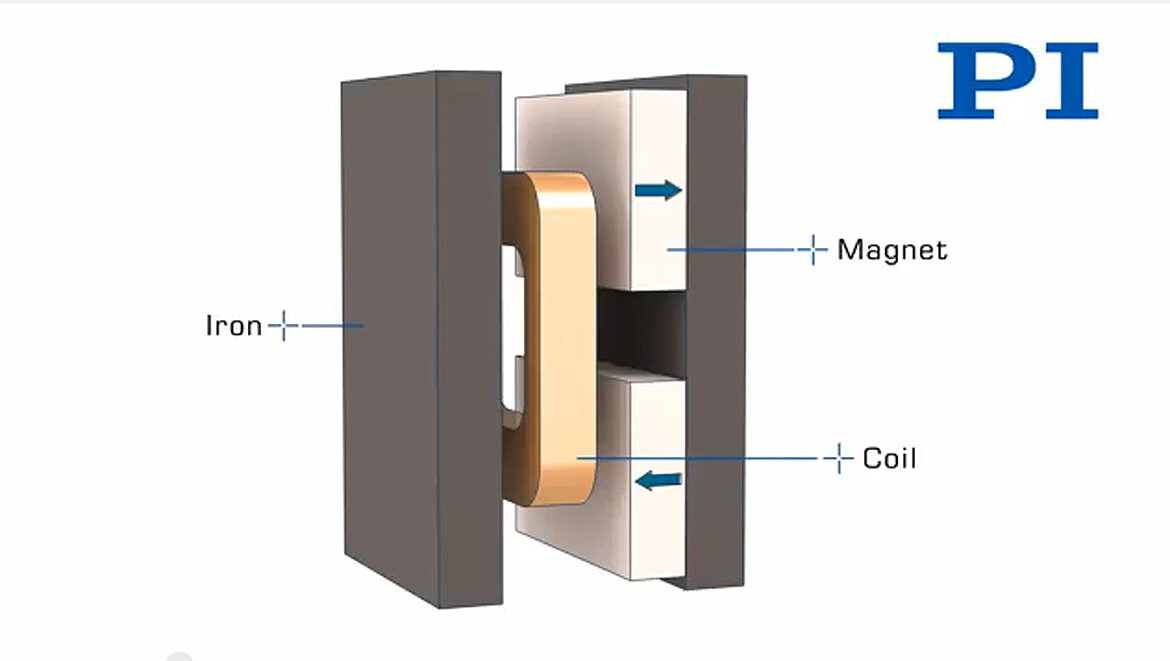
Iron Core and Ironless Linear Motors
Typically, two types of brushless linear motors are used in magnetic direct drive technology: ironless linear motors and iron core linear motors.
With iron core motors, the active part (primary part) consists of a sheet metal stack (ferromagnetic steel) with “teeth” and the coils wound around those teeth.
Basically iron core motors provide high force and low cost, but the cyclical variation of moving force within the magnetic field (cogging) has negative side effects on the precision of the positioning device due to limited bearing stiffness. The high attraction forces between the sheet metal stack and the magnets can cause wear of the linear guides and the (moving) mass of the iron core can limit the dynamic performance of the positioner.

Ironless motors are the top choice in precision motion control applications. Here, the two-sided magnetic yoke usually is the fixed part and the lightweight, moving forcer typically consists of air coils which significantly reduce moving mass / inertia compared to moving iron cores. While ironless motors provide lower forces compared to iron core motors and are more expensive due to twice the amount of magnetic material used, they have advantages in dynamics and accuracy. There are no attraction forces between motor and magnets and no cogging (variation in forces along the stroke).
The V-551 linear motor stage uses ironless motors, but instead of moving the coils, the magnetic track is attached to the platform. The reason for this design is that typically, with linear motor stages, the parts with the highest wear are moving cables, limiting the lifetime of such a device.
As with the motor, also the for the absolute position encoder, the scale is moving instead of the sensor head, eliminating all moving cables from the design. Now lifetime is only limited by the linear crossed-roller bearings. The V-115 integrated linear motor integrated is “oversized” running in a low temperature window even under dynamic applications.
Absolute Encoder vs. Incremental Encoders
The basic version is equipped with an absolute encoder which provides advantages especially in automation applications: No more reference moves required and no more phase finding at power up. Absolute encoders have been improved continuously over the last decade in terms of resolution and cost, however, when it comes to highest possible resolution, incremental encoders still have the edge.
For sub-nanometer resolution performance, PI uses an in-house designed incremental encoder (PIOne).
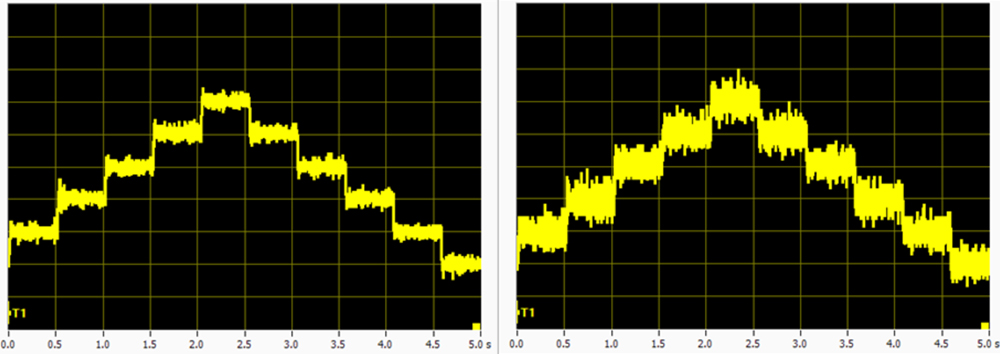
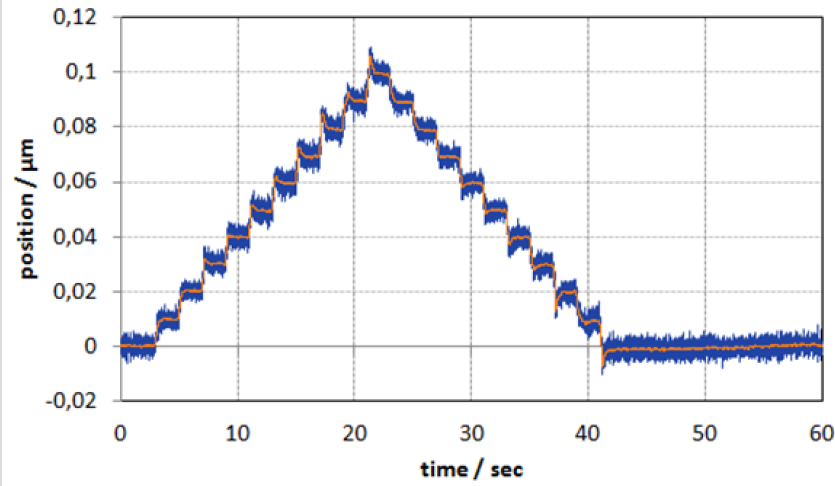
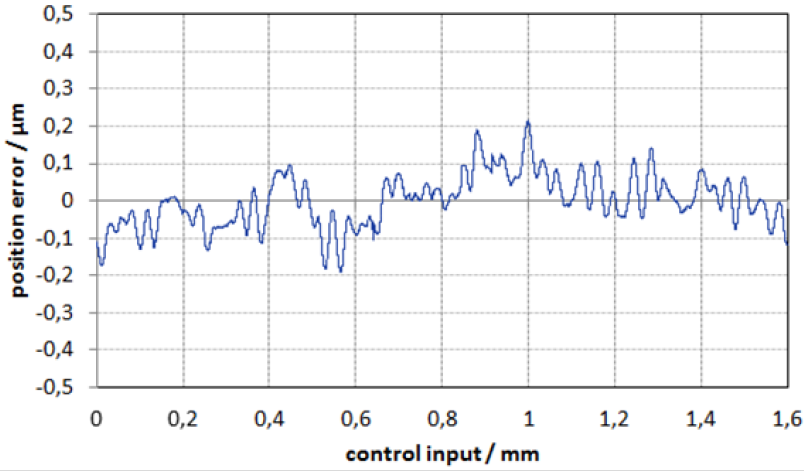
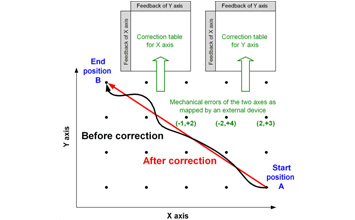
Mechanical Precision
When it comes to nanopositioning applications, smallest details in the design and assembly of the positioning devices matter. These in include, stress relieved materials, precision machining of essential surfaces / mounting interfaces after the final heat treatment (i.e. anodizing process), assembly and alignment of all mechanical components using state-of-the-art metrology equipment and last but not least, performance testing in a metrology lab with designed to provide the stability and accuracy required in the nano-world.




Blog Categories
- Aero-Space
- Air Bearing Stages, Components, Systems
- Astronomy
- Automation, Nano-Automation
- Beamline Instrumentation
- Bio-Medical
- Hexapods
- Imaging & Microscopy
- Laser Machining, Processing
- Linear Actuators
- Linear Motor, Positioning System
- Metrology
- Microscopy
- Motorized Precision Positioners
- Multi-Axis Motion
- Nanopositioning
- Photonics
- Piezo Actuators, Motors
- Piezo Mechanics
- Piezo Transducers / Sensors
- Precision Machining
- Semicon
- Software Tools
- UHV Positioning Stage
- Voice Coil Linear Actuator
- X-Ray Spectroscopy