Piezo stacks and piezo chip actuators have long been used for optical cavity tuning. Together with capacitive sensors very precise Fabry Perot filters can be designed. While displacement ranges of traditional piezo stacks are typically limited to the 10’s of micron ranges, piezoelectric motors provide longer ranges.
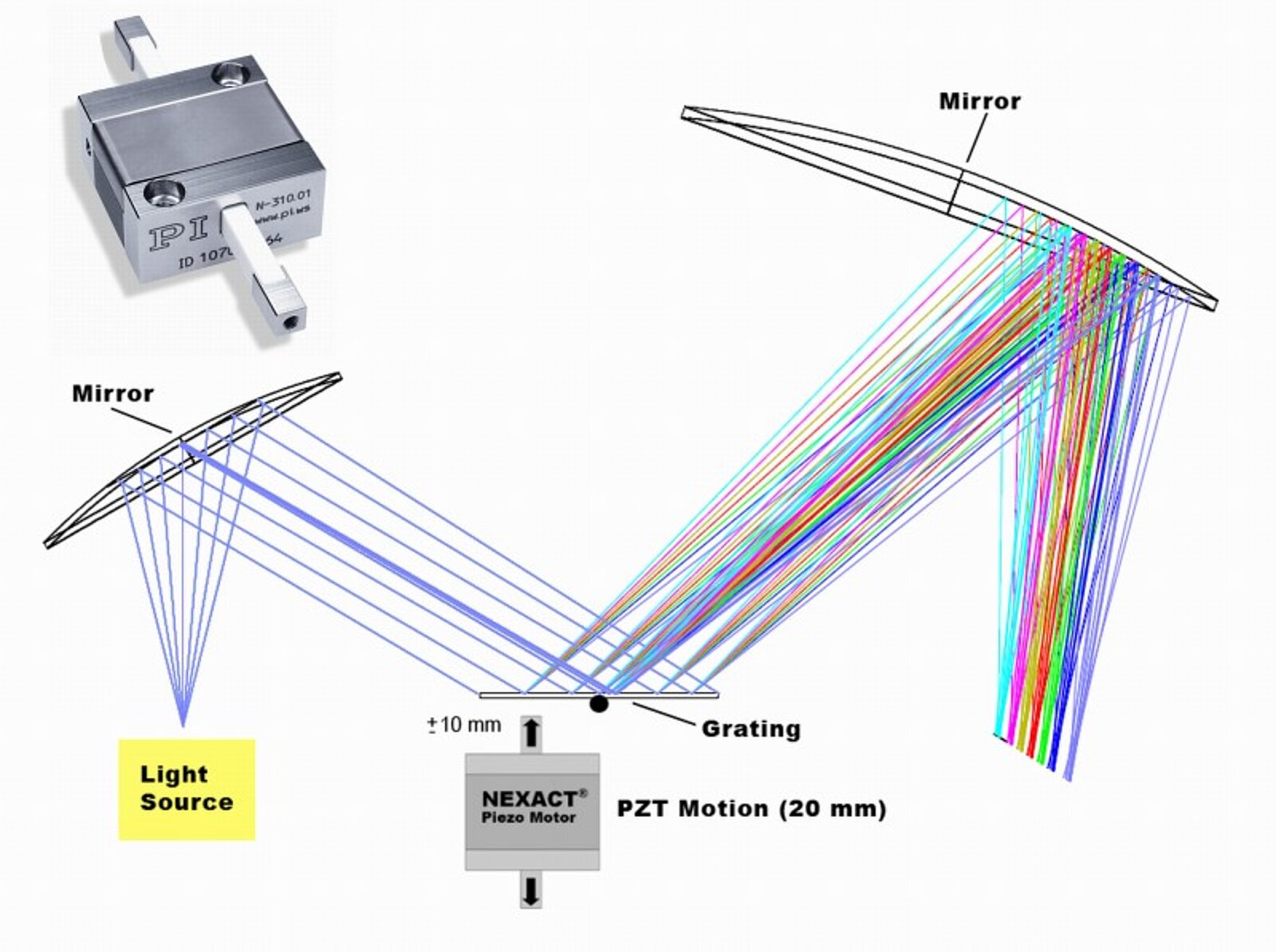
A miniature linear motor actuator based on the Piezo Walk principle with a highly dynamic sweep mode combines long travel ranges to 20 mm and speeds to 10 mm/sec with sub-nanometer resolution and sub-millisecond response to enable continuous tuning and wavelength sweeps of lasers and monochromators.
Precision Actuators: Key Components in Tunable Lasers & Spectrophotometers
Many of today's tunable lasers rely on the performance of a micropositioning or nanopositioning actuator to position a diffraction grating with extreme precision and repeatability. While the virtually unlimited resolution and extremely fast response of piezo stack actuators is very desirable in these applications, their limited travel (typically <100 µm) is often a K.O. criterion. To overcome the limited range, DC-motorized micrometers and stepper-motor-driven leadscrew actuators have been employed by laser manufacturers in the past.
However, these systems cannot provide the ultra-smooth piezo-class motion required for wavelength sweeps. Their precision is also affected by friction and backlash of the mechanical drive screw and their limited dynamic performance leaves laser designers wanting.
PiezoWalk Drive Principle Overcomes Limitations of Classical Piezo Actuators
A novel, ultra-compact linear drive based on the PiezoWalk® principle has been developed by PI to overcome the limitations of conventional linear actuators. The precision actuator, dubbed NEXACT®, combines virtually unlimited travel ranges with high stiffness and bandwidth in a very small package. Furthermore, NEXACT® actuators provide piezo-class resolution (far below one nanometer) and millisecond response. The special drive design works with a very low operating voltage of 40 V and below.
Sweep Mode with High Bandwidth & Resolution, Friction or Drift Free

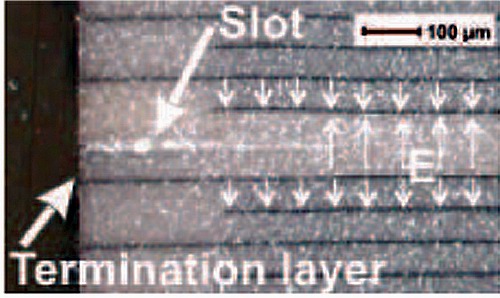
In operation, piezoceramic bending elements act on the ceramic runner, which is connected to the moving part of the application. The length of the runner determines the travel range. Force capacity, resolution and velocity are determined by the piezo geometry and drive electronics, and are scalable. To move the runner over longer distances the stepping mode is used, whereas for smaller distances, the linear sweep mode offers up to 7 microns of high-dynamics positioning with resolutions far below one nanometer and bandwidth in the kHz range. Because the principle is not based on sliding friction (as with ultrasonic or inertial motors) there is virtually no particulate generation. The NEXACT® drive principle offers very high repeatability and can hold a stable position to nanometers even when powered down.
Another advantage is the autolocking feature with virtually no heat dissipation at rest, a great improvement over stepper motors, thus eliminating laser drift. The ceramic actuators require no lubricants, so the NEXACT® drive principle is high-vacuum compatible, as well as being and non-magnetic. Because linear motion is generated in the first place, backlash, friction and wear as caused by conventional rotating tip actuators are not an issue here.
A compact benchtop controller with high-level command interface and comprehensive software driver package and OEM PCB versions are available to drive the actuators.
Summary
The NEXACT® drive is the ideal precision linear actuator for OEMs. It provides extremely high dynamics, resolution and stability. Its miniature size (only 25x25x12 mm) along with easy control and long lifetime (no wear) allow seamless integration into the final product.
Read more on experimental-based comparison between off-axis integrated cavity output spectroscopy and multipass-assisted wavelength modulation spectroscopy at 7.7 µm using a DC motor Actuator and Piezo Actuator.




Blog Categories
- Aero-Space
- Air Bearing Stages, Components, Systems
- Astronomy
- Automation, Nano-Automation
- Beamline Instrumentation
- Bio-Medical
- Hexapods
- Imaging & Microscopy
- Laser Machining, Processing
- Linear Actuators
- Linear Motor, Positioning System
- Metrology
- Microscopy
- Motorized Precision Positioners
- Multi-Axis Motion
- Nanopositioning
- Photonics
- Piezo Actuators, Motors
- Piezo Mechanics
- Piezo Transducers / Sensors
- Precision Machining
- Semicon
- Software Tools
- UHV Positioning Stage
- Voice Coil Linear Actuator
- X-Ray Spectroscopy